2.2 Sketching Haptic Interactions
Concept
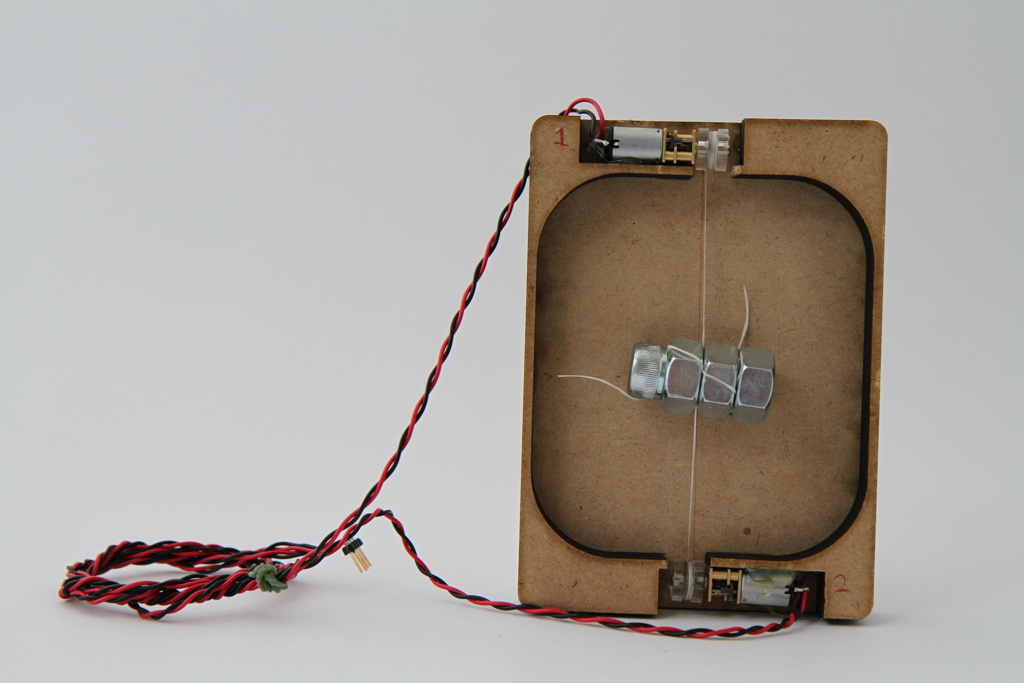
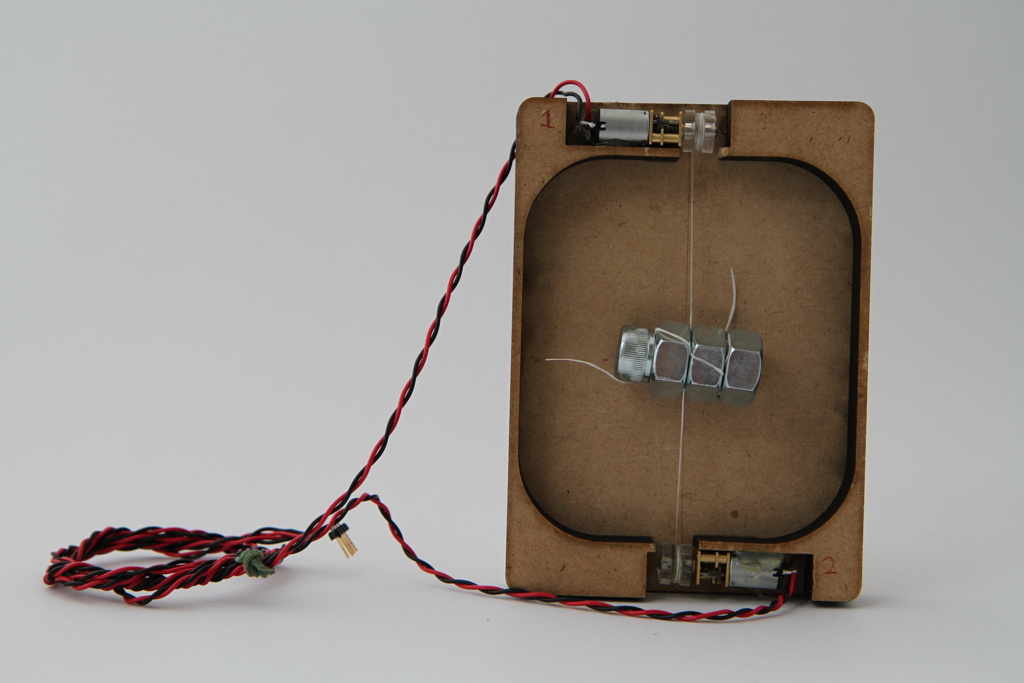
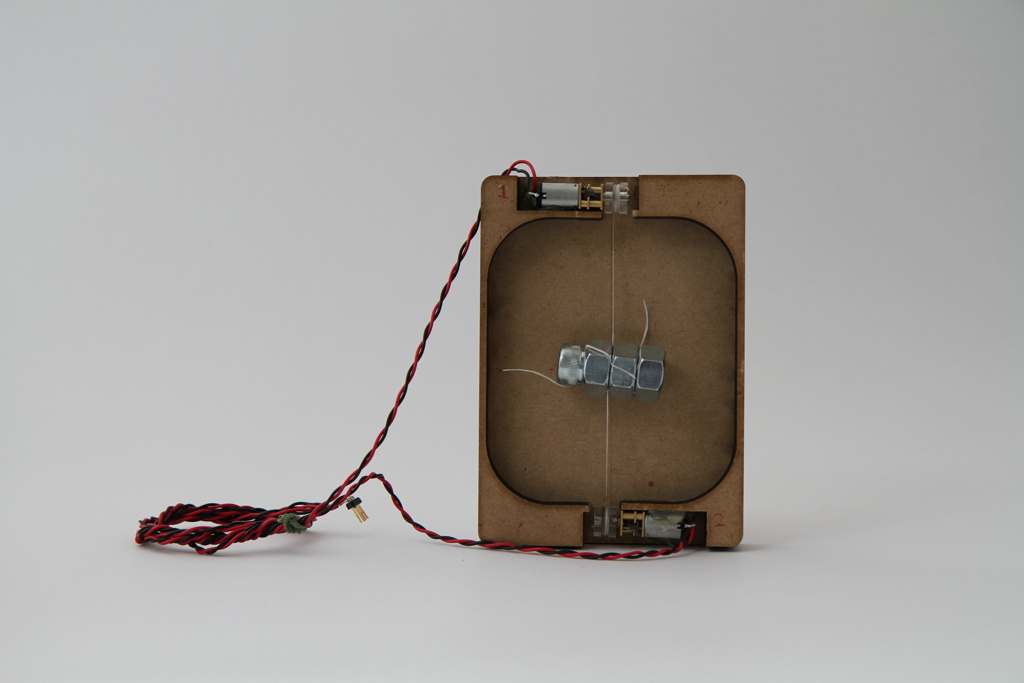
Move the center of mass of a handheld device along one axis.
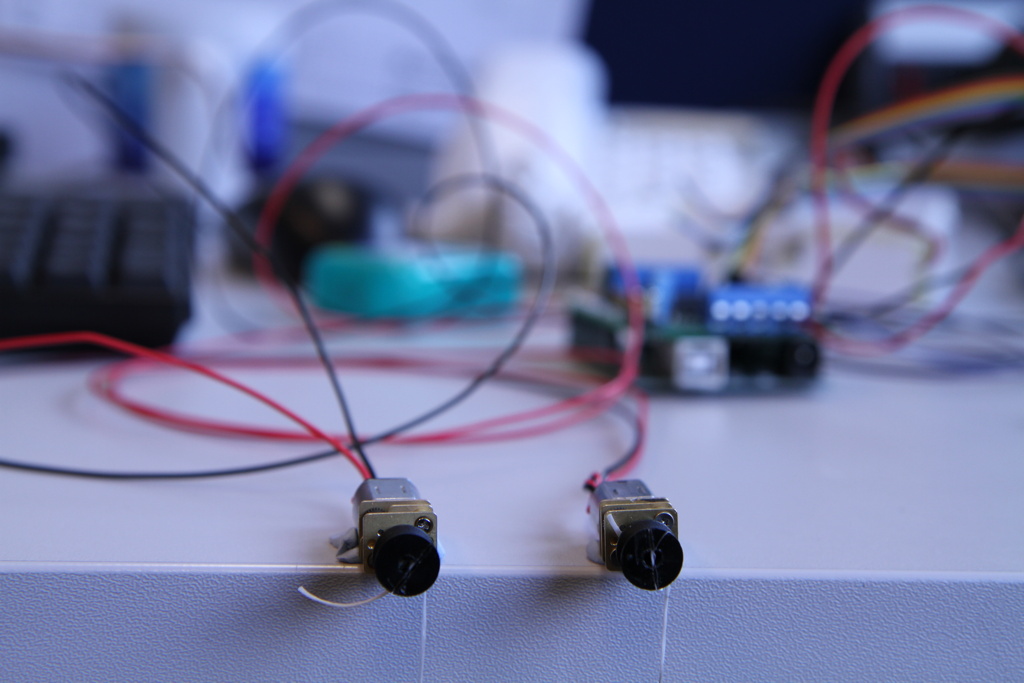
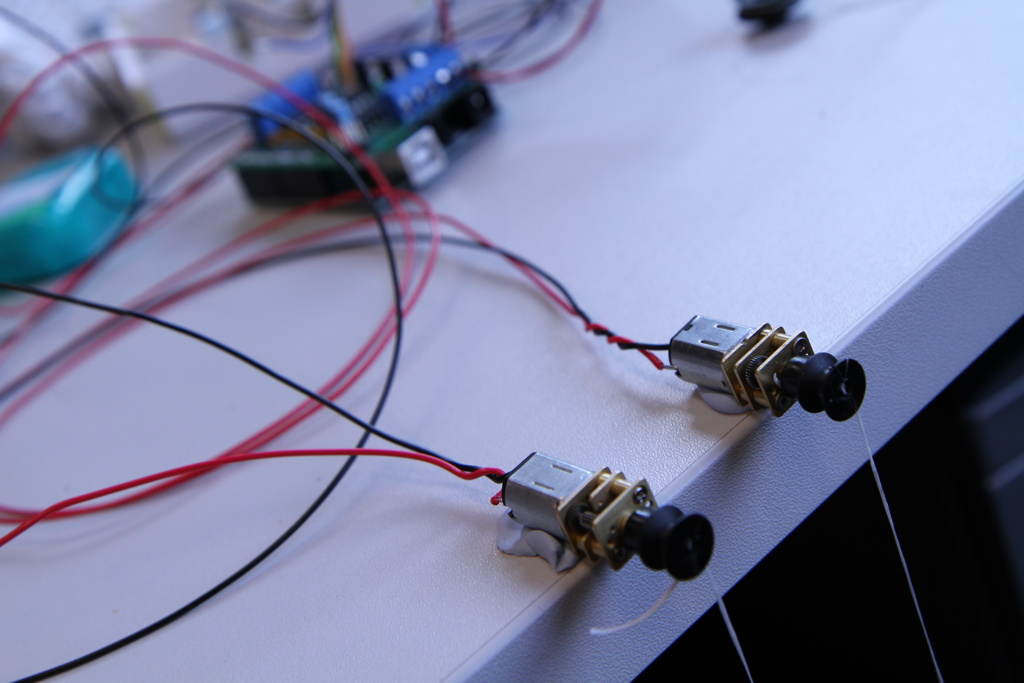
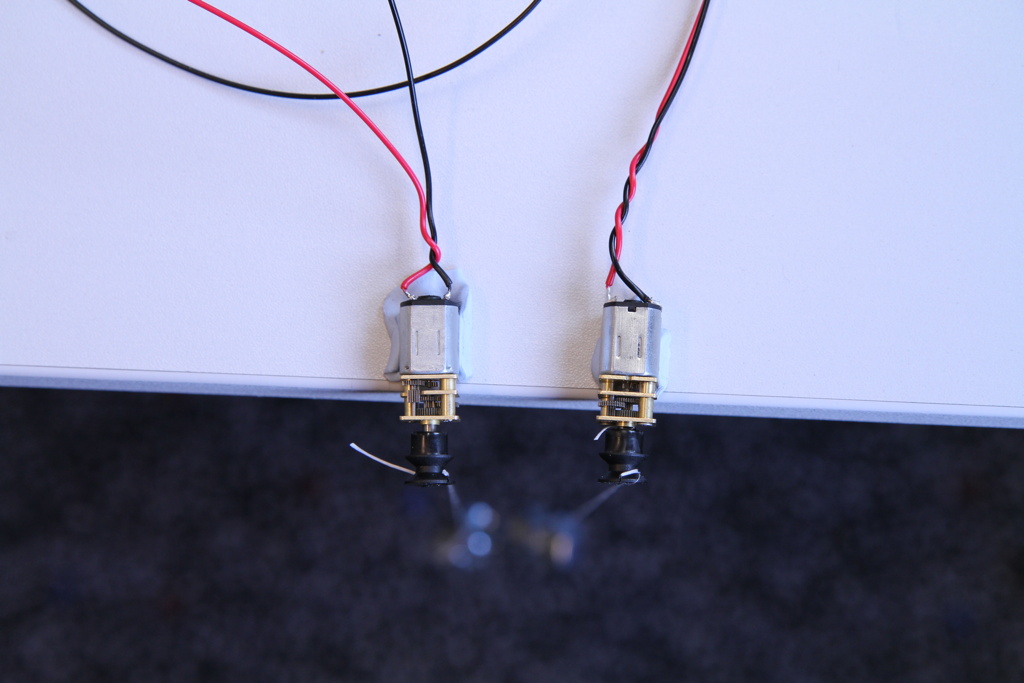
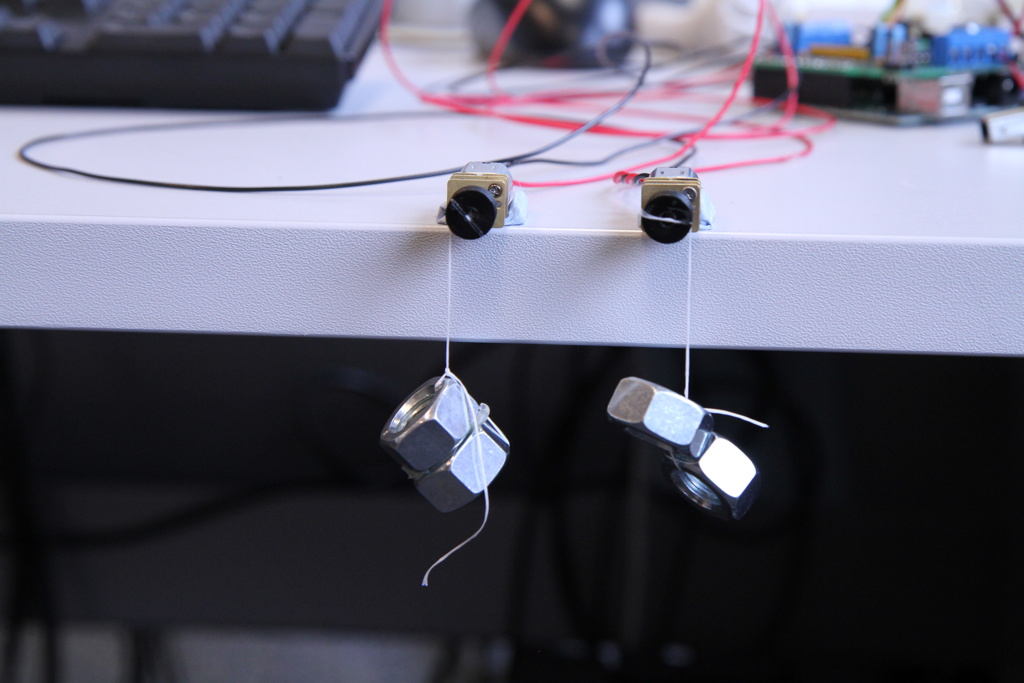
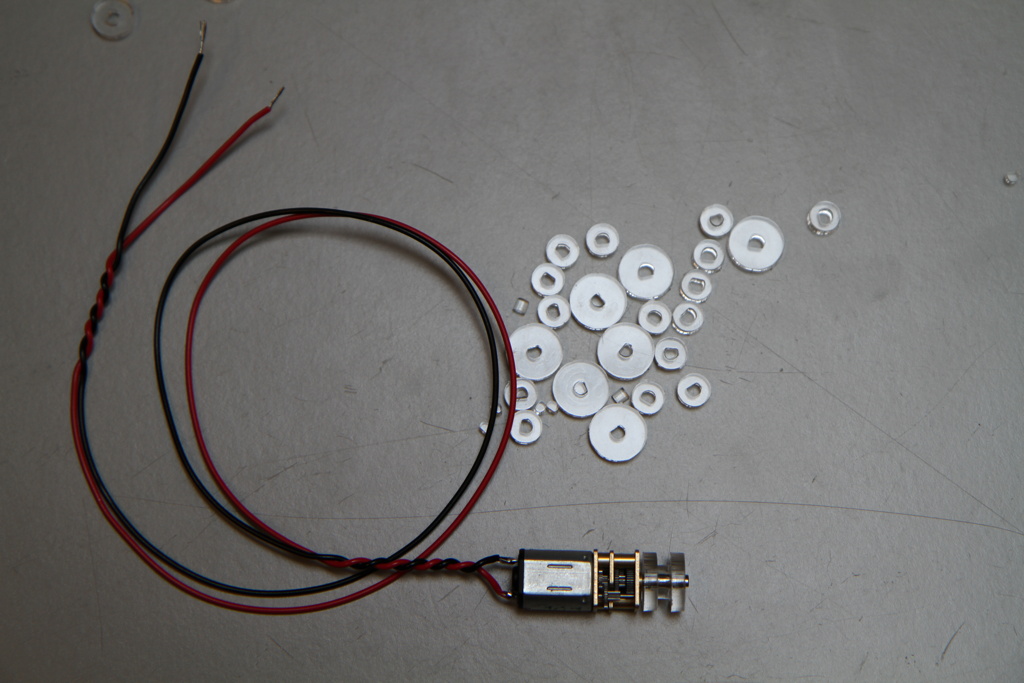
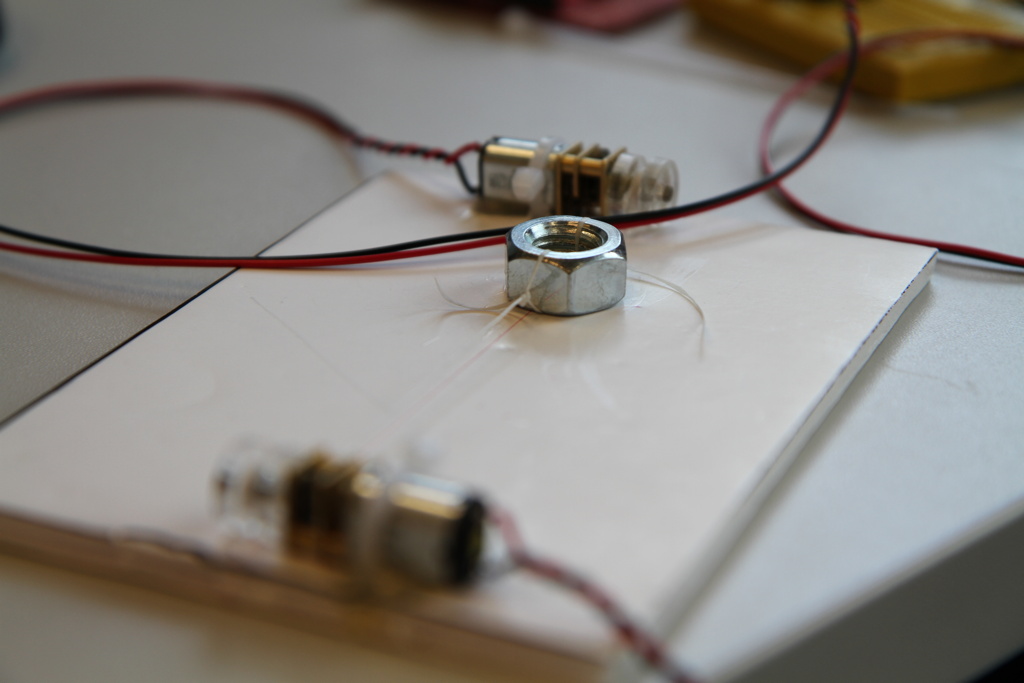
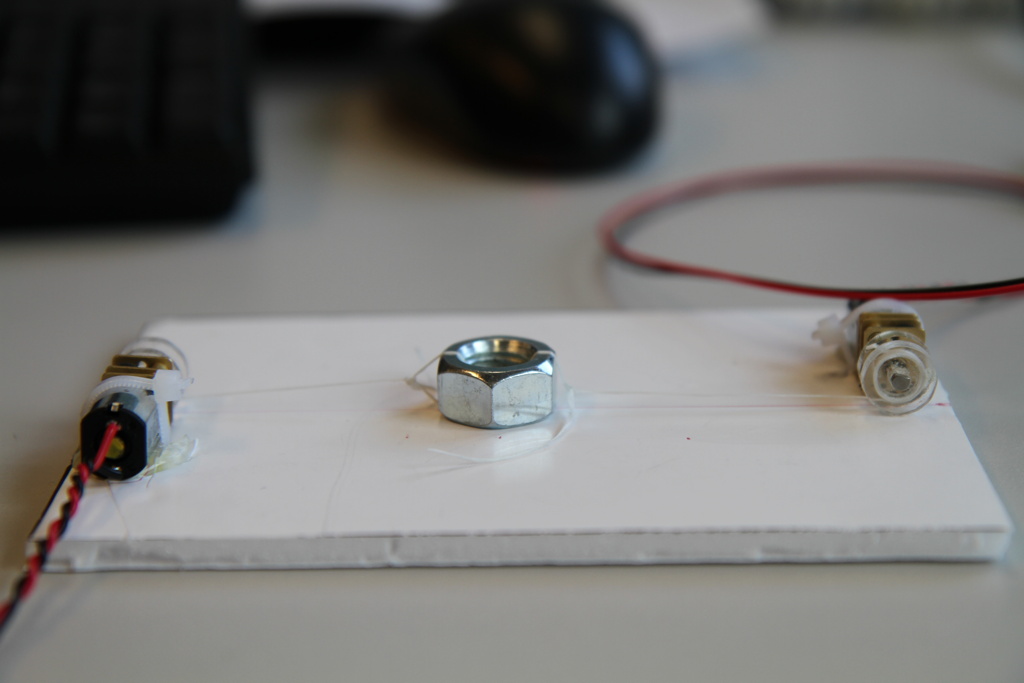
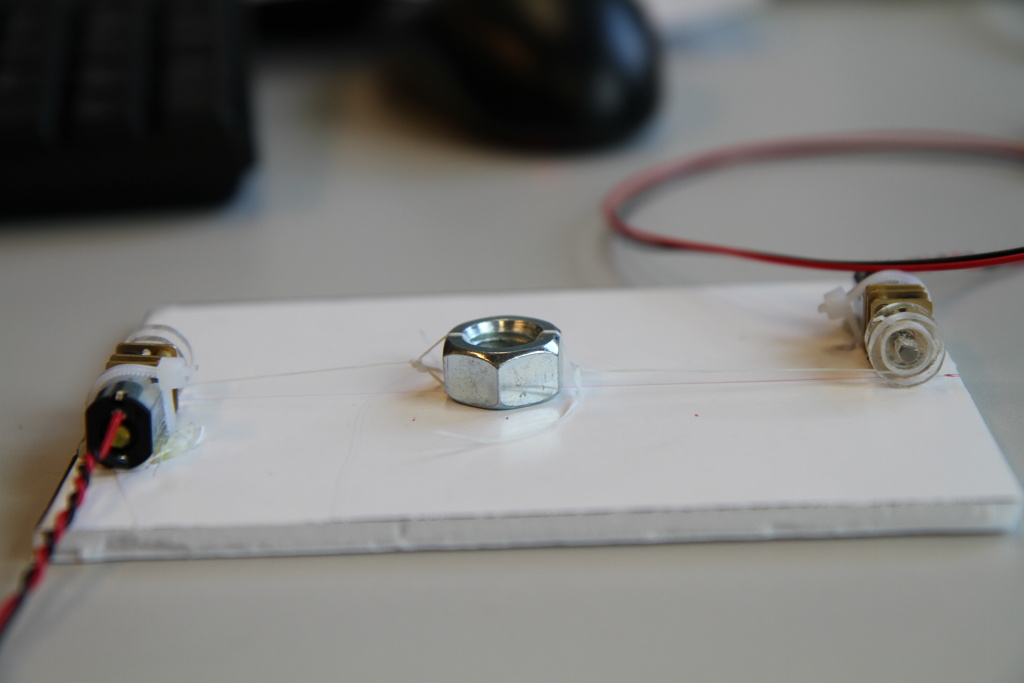
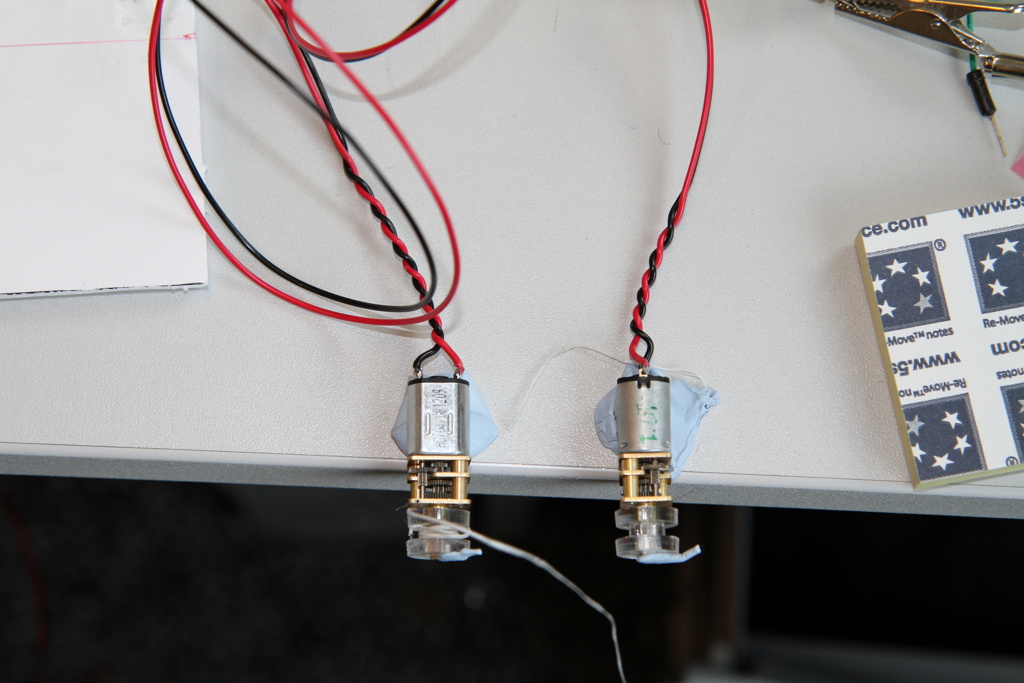
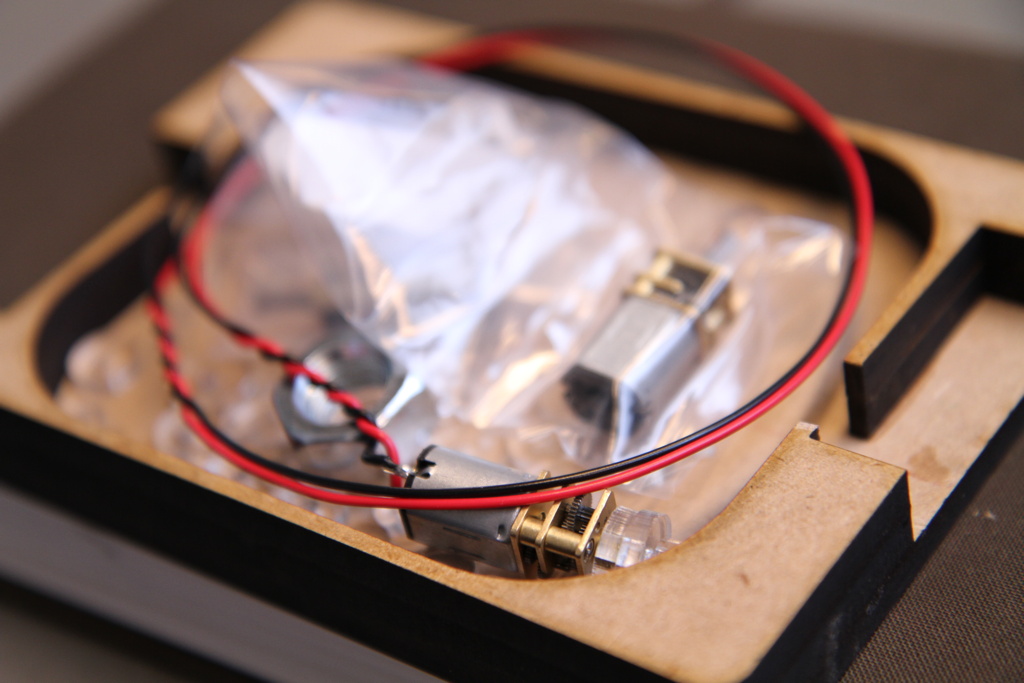
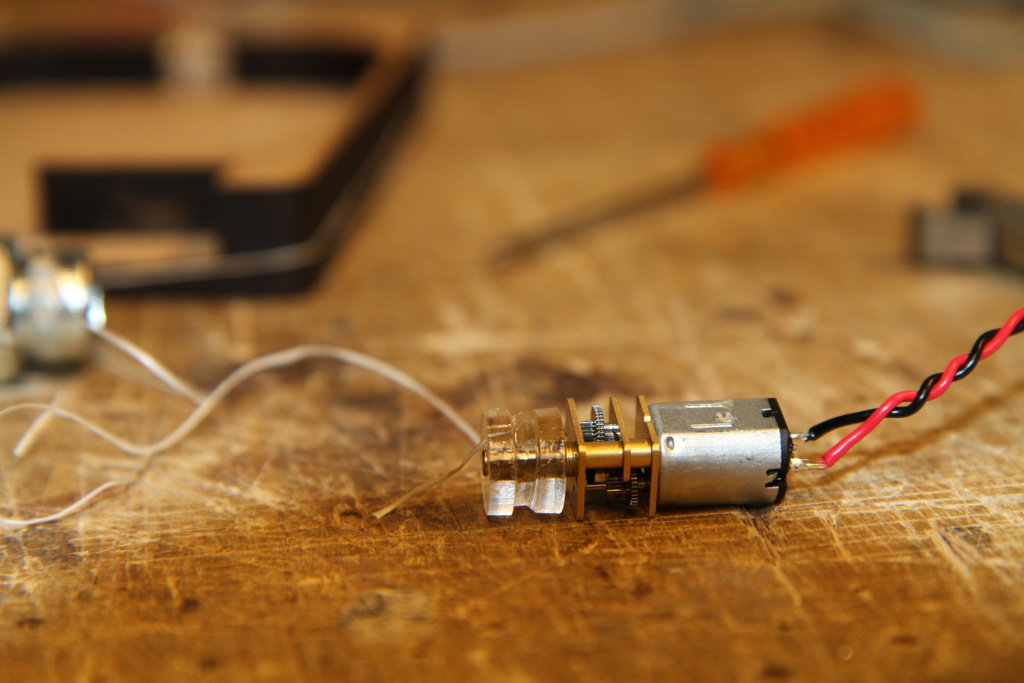
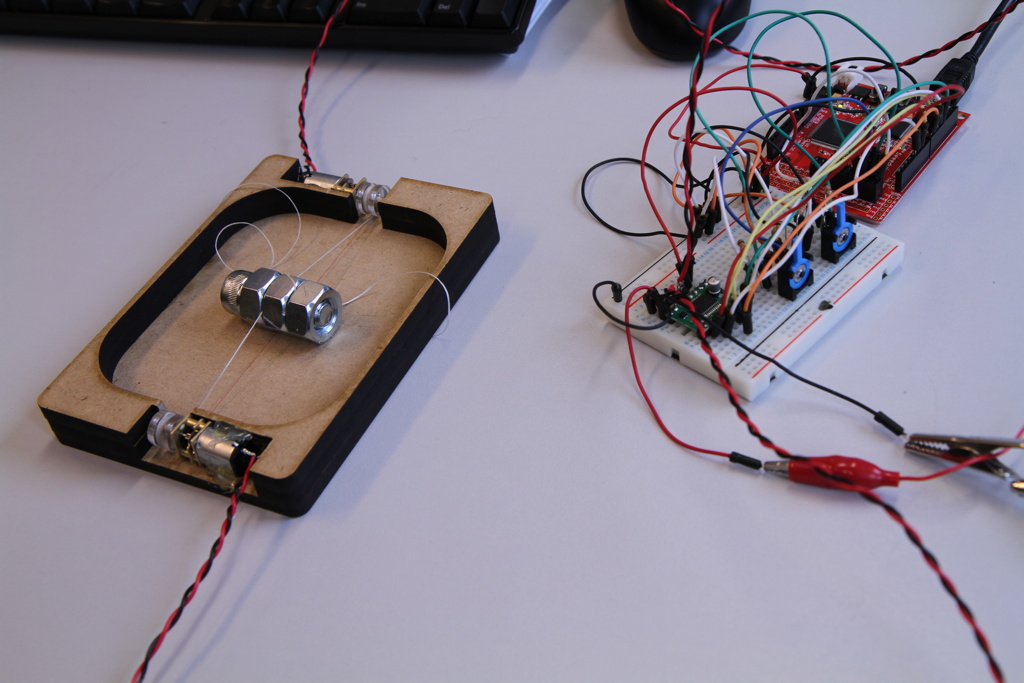
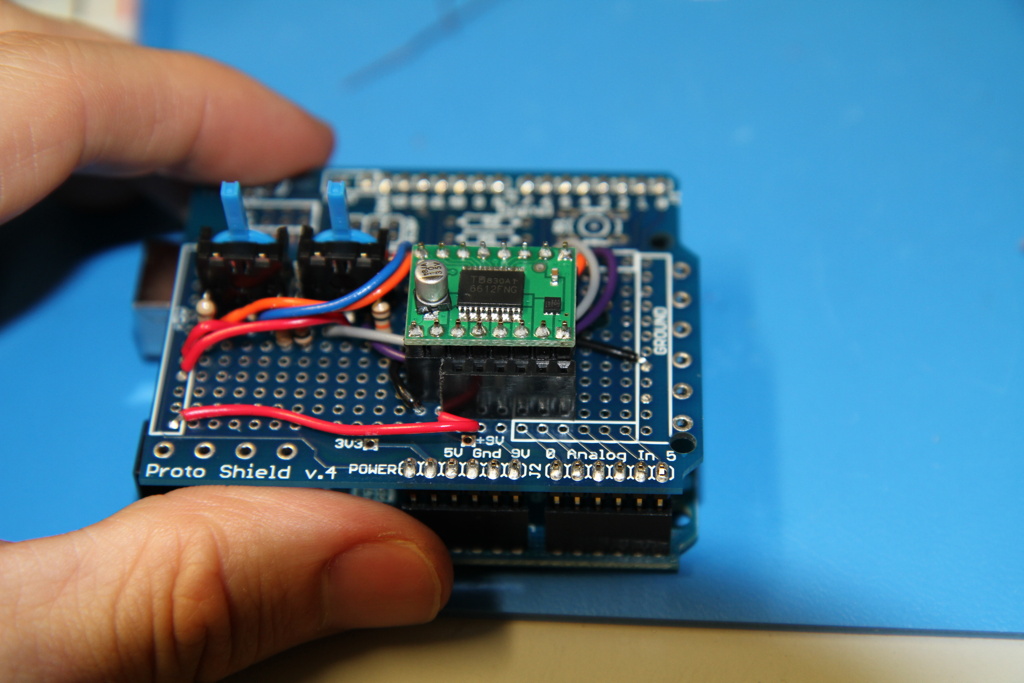
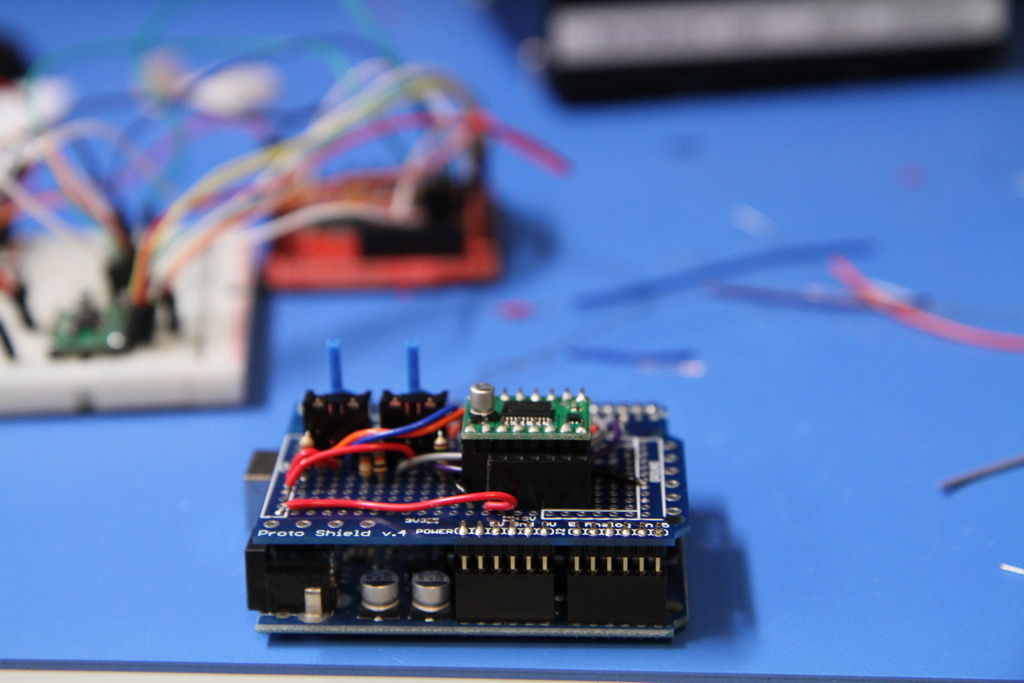
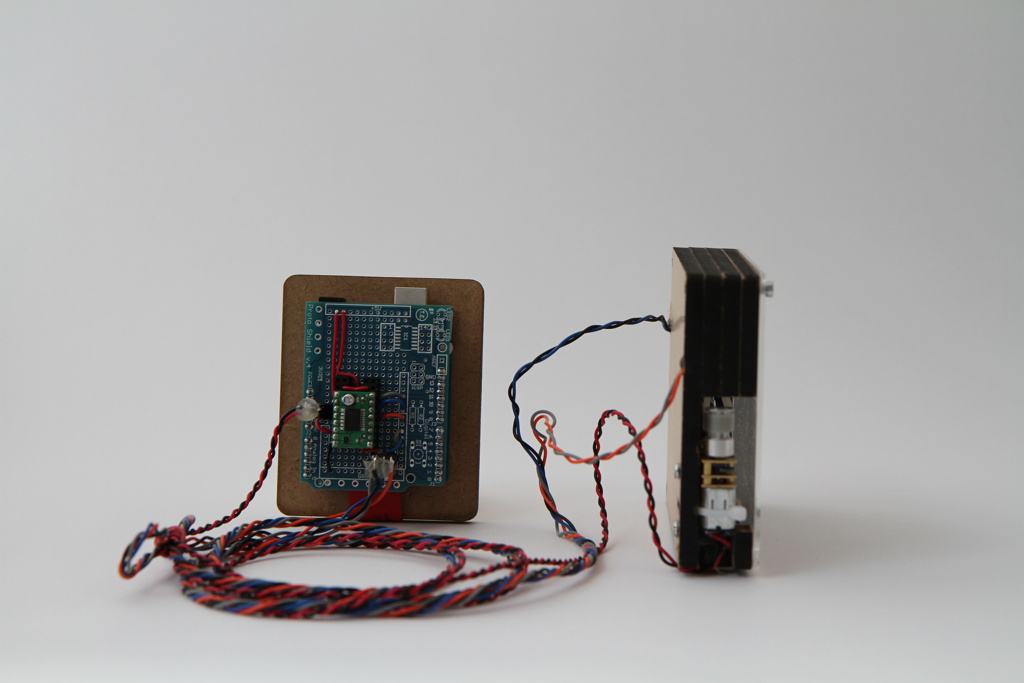
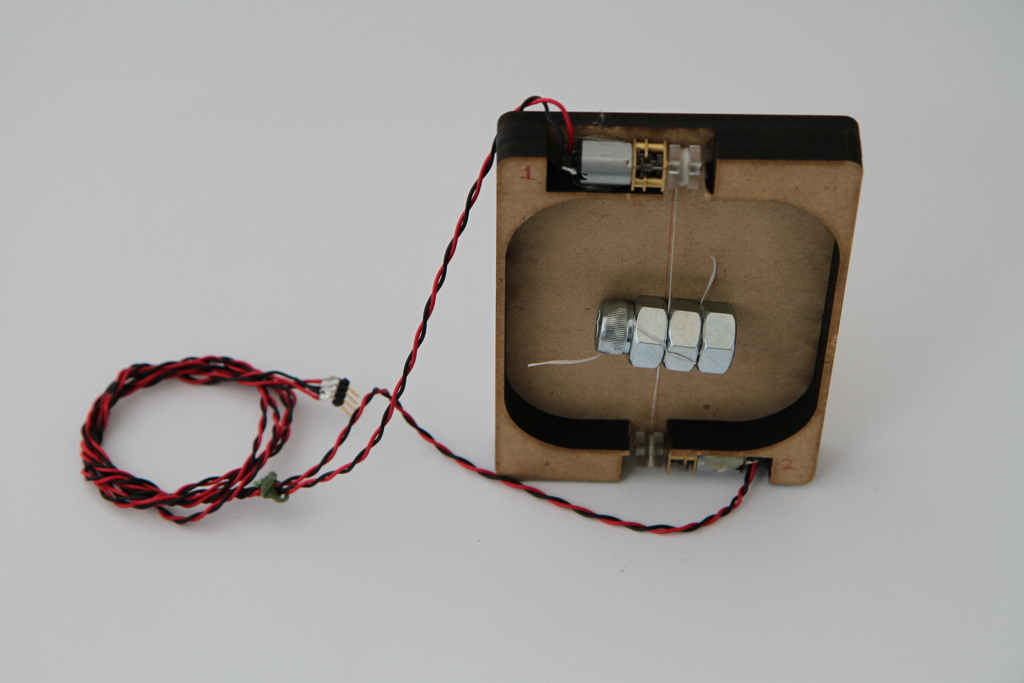
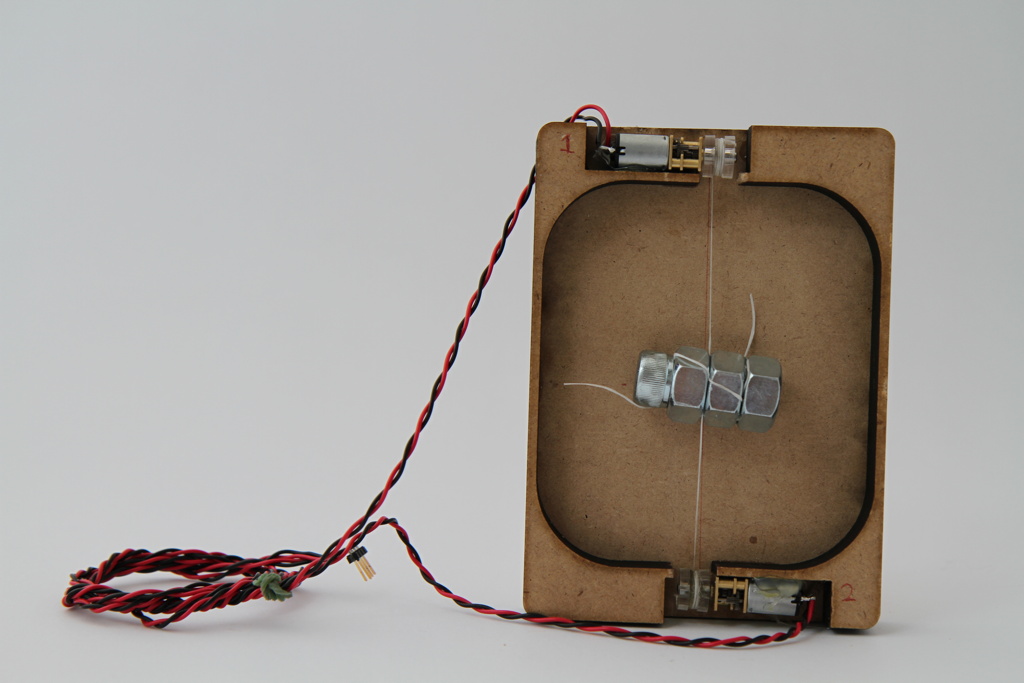
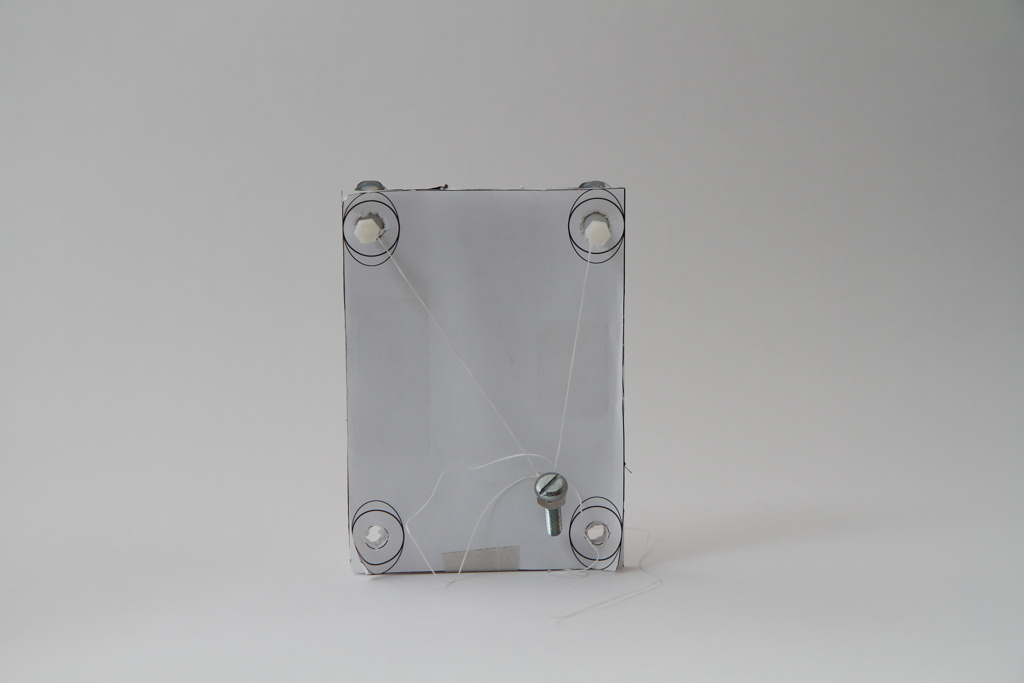
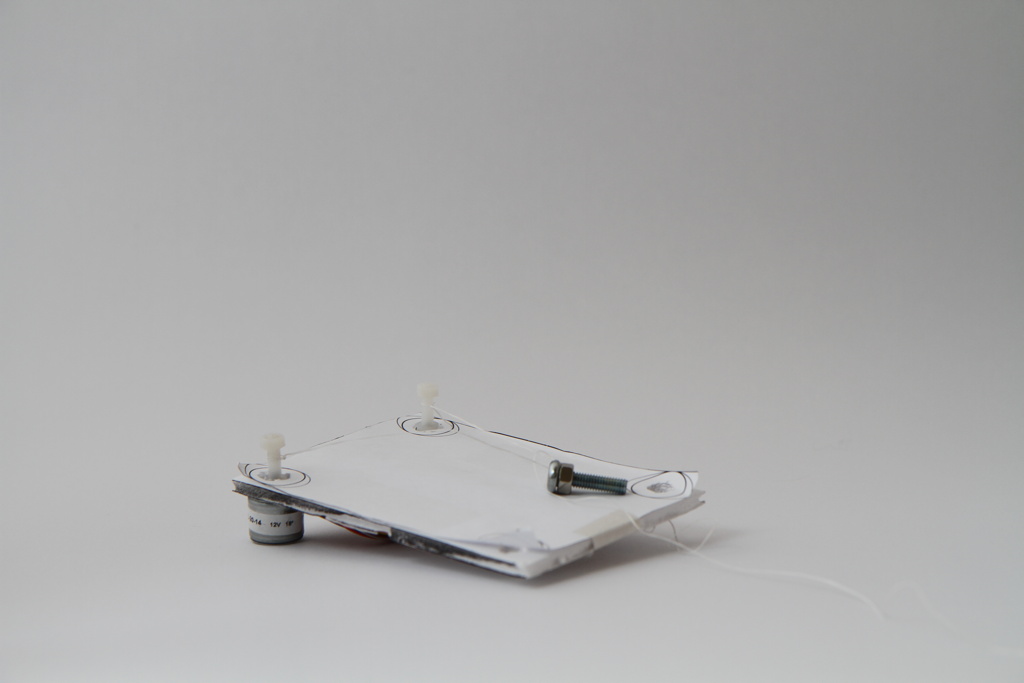
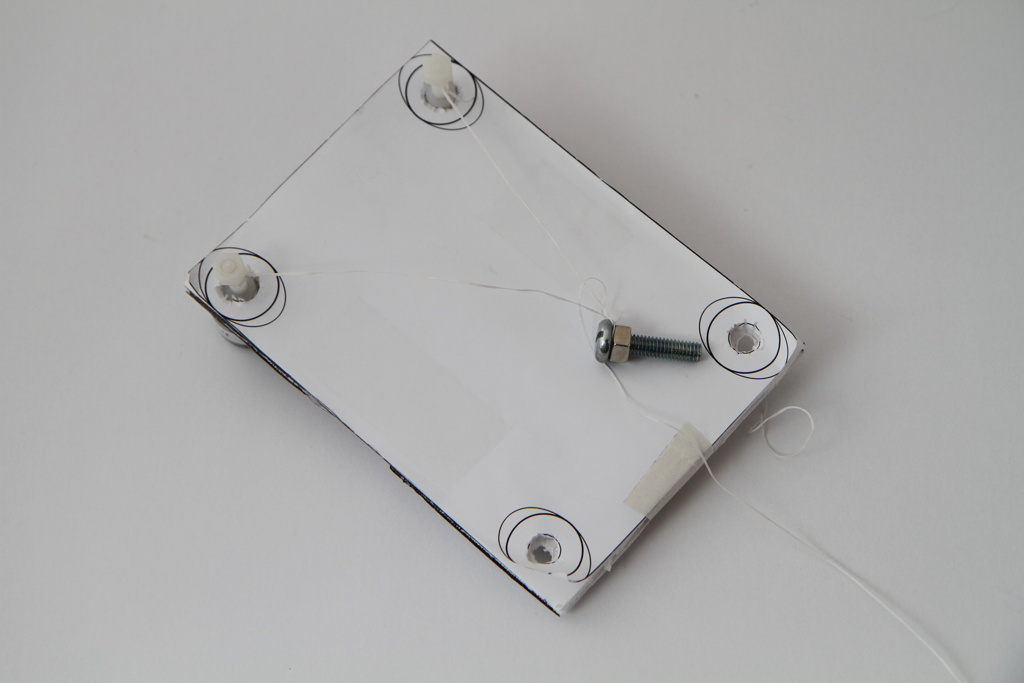
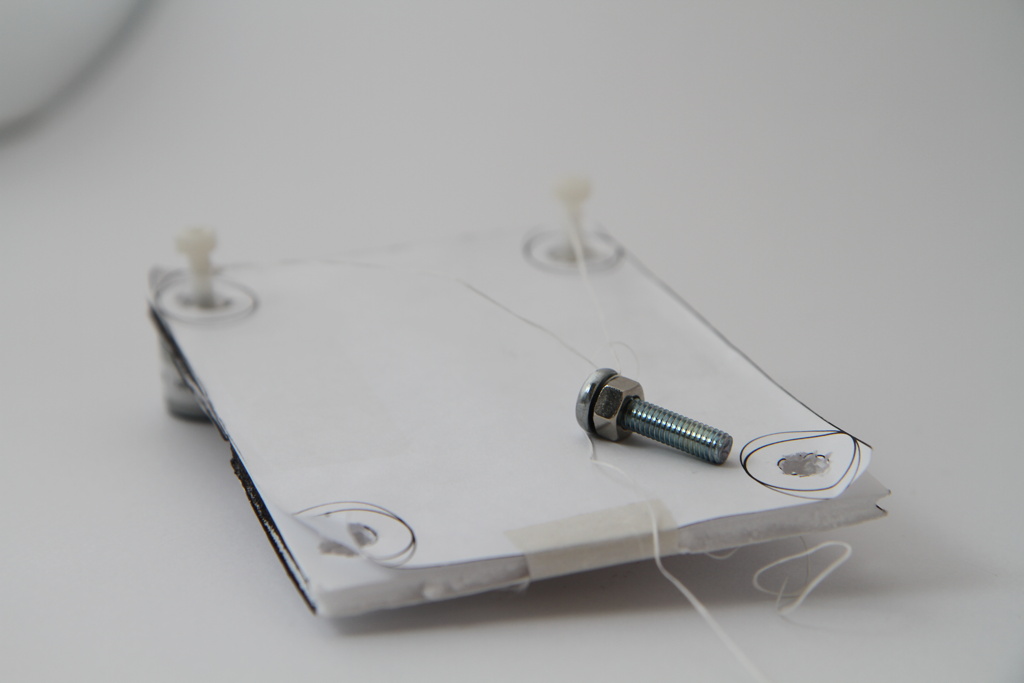
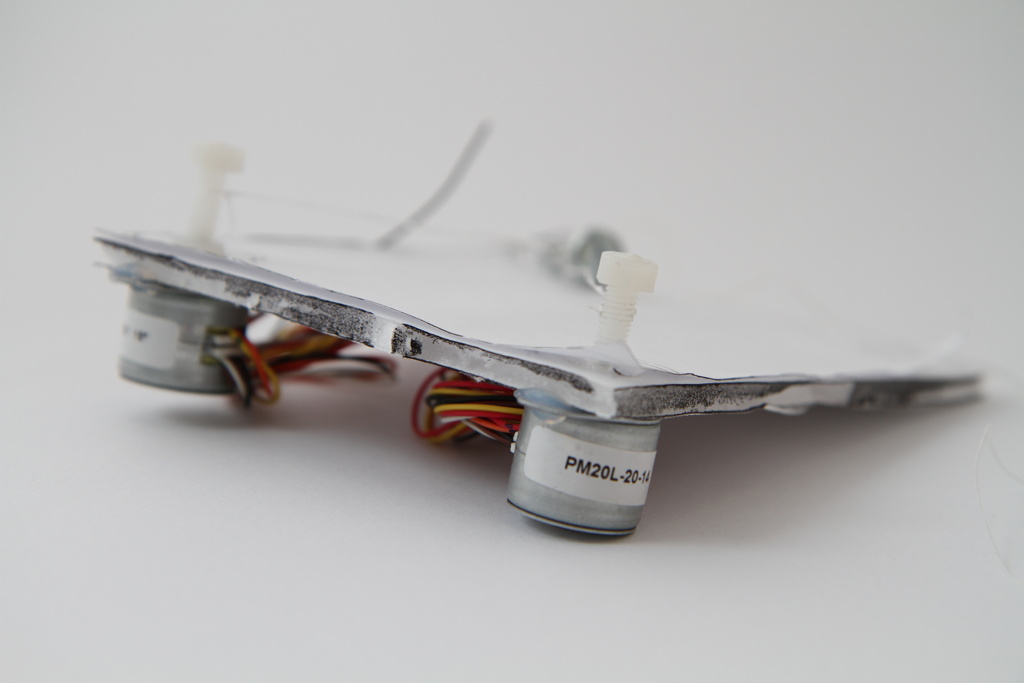
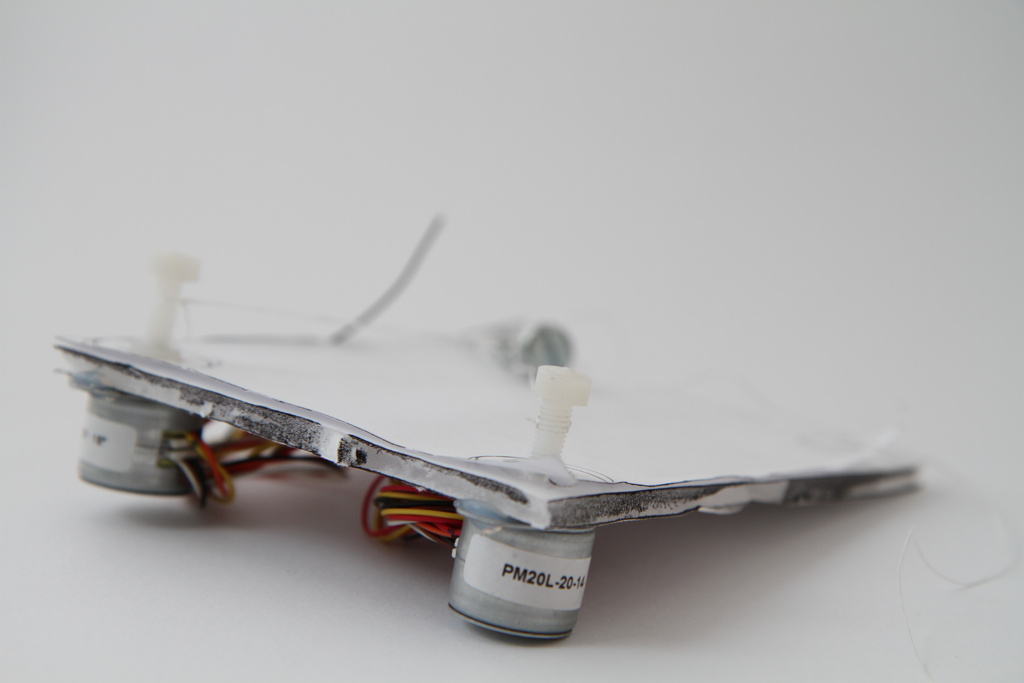
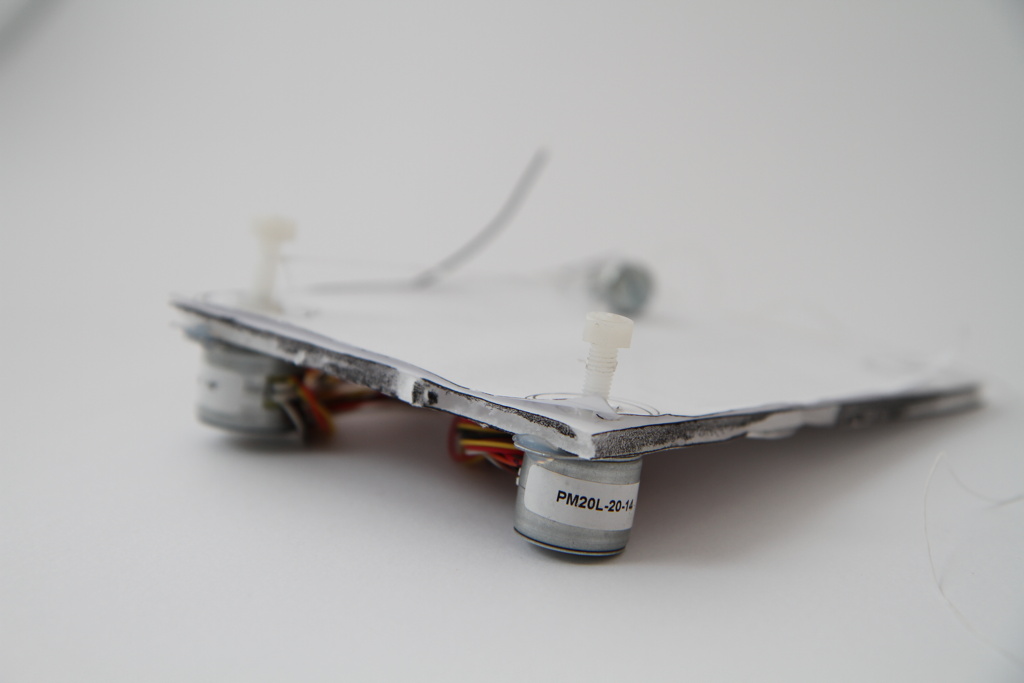
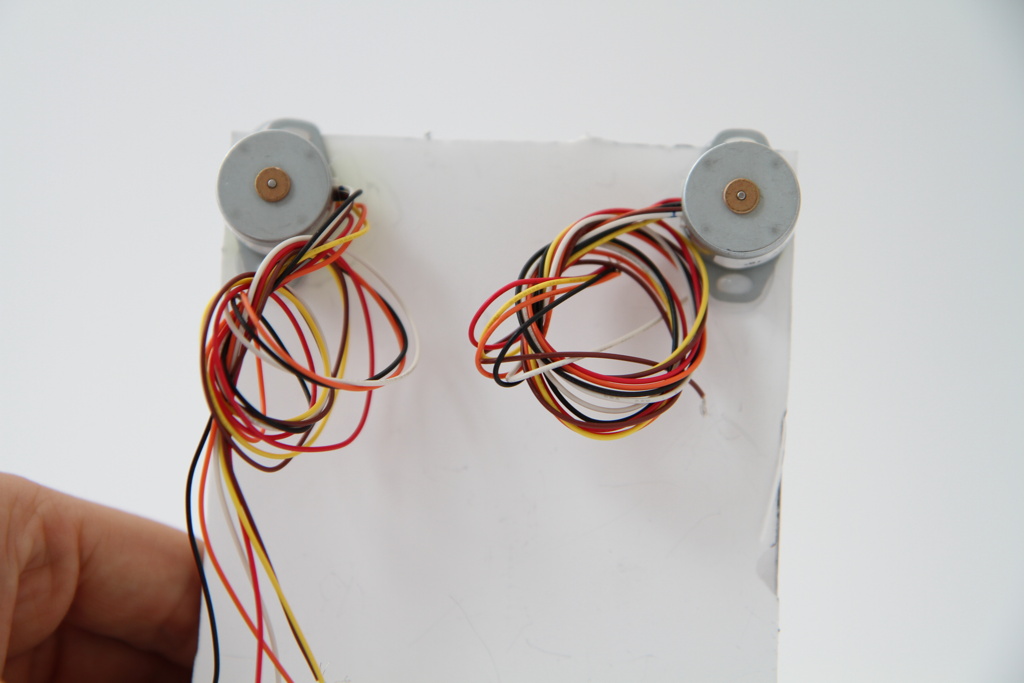
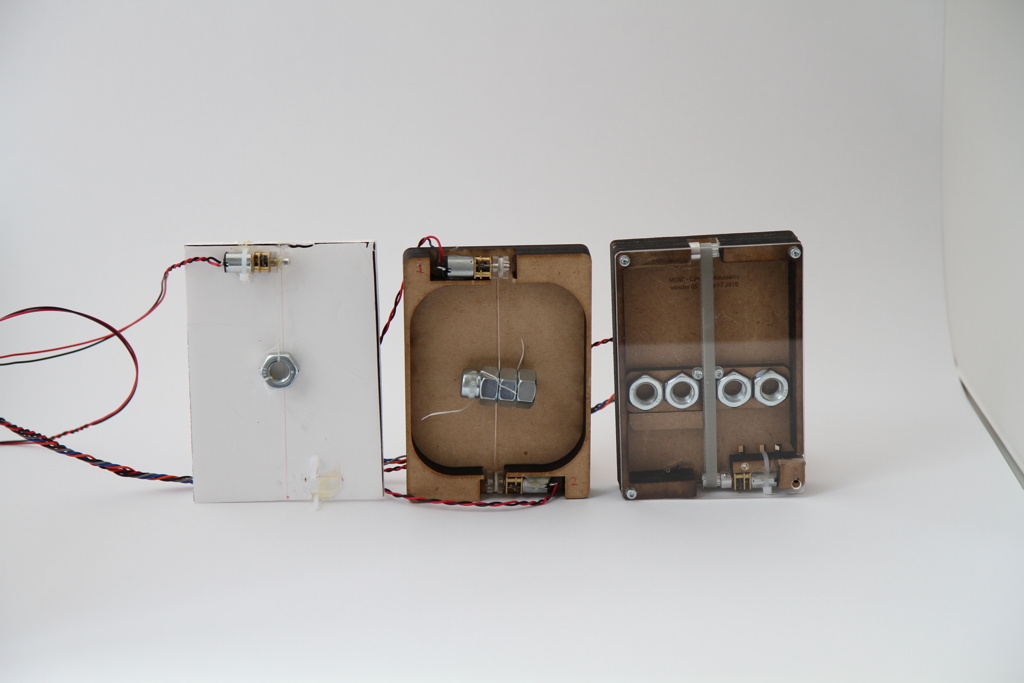
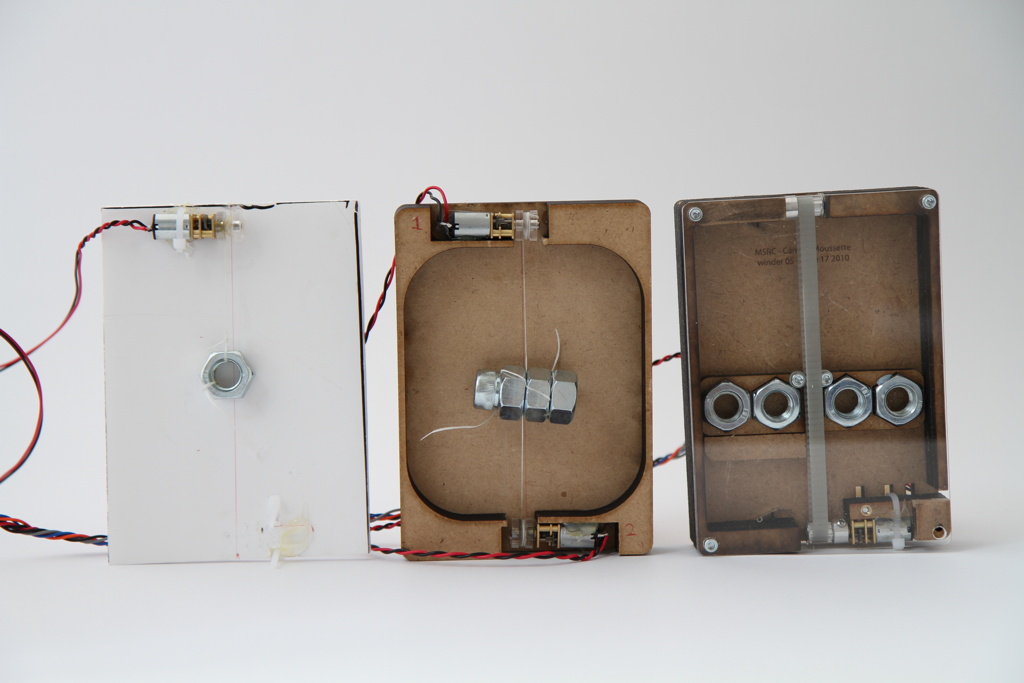
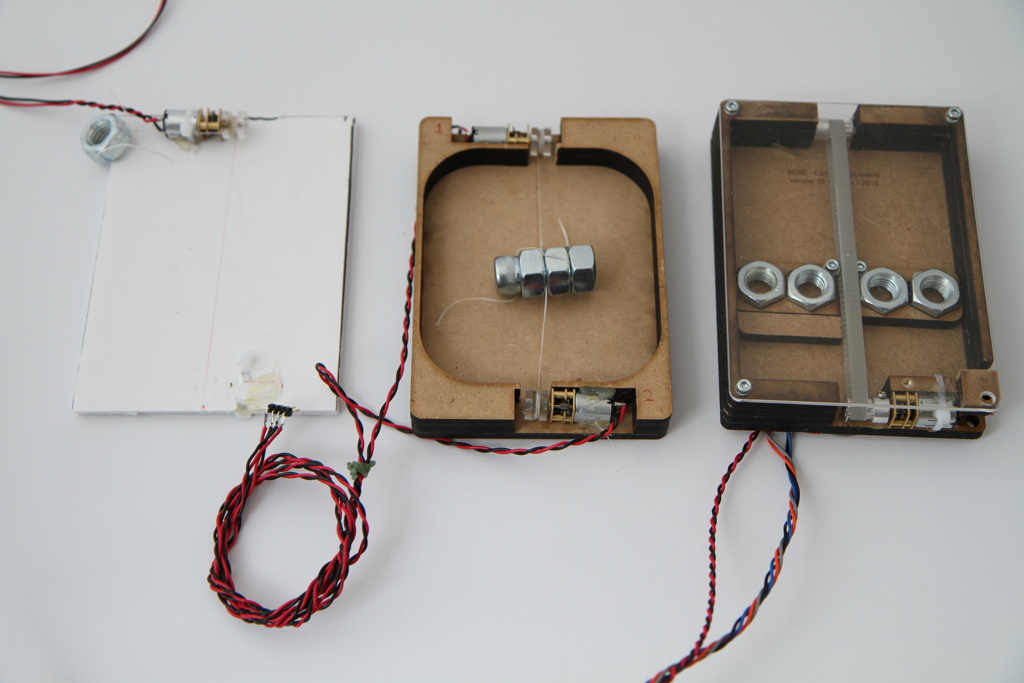
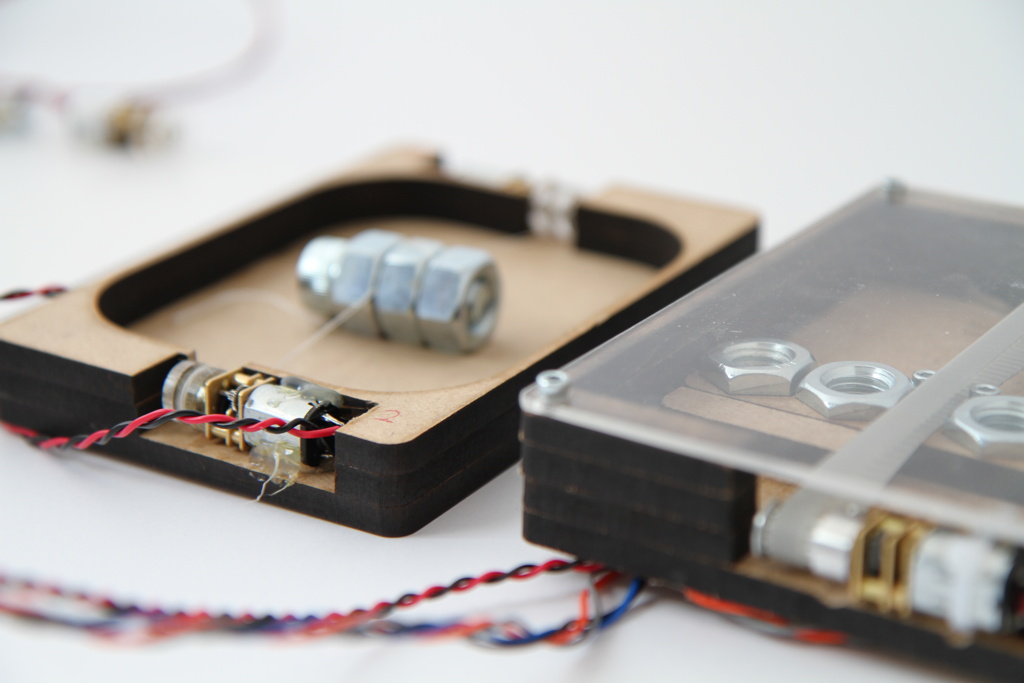
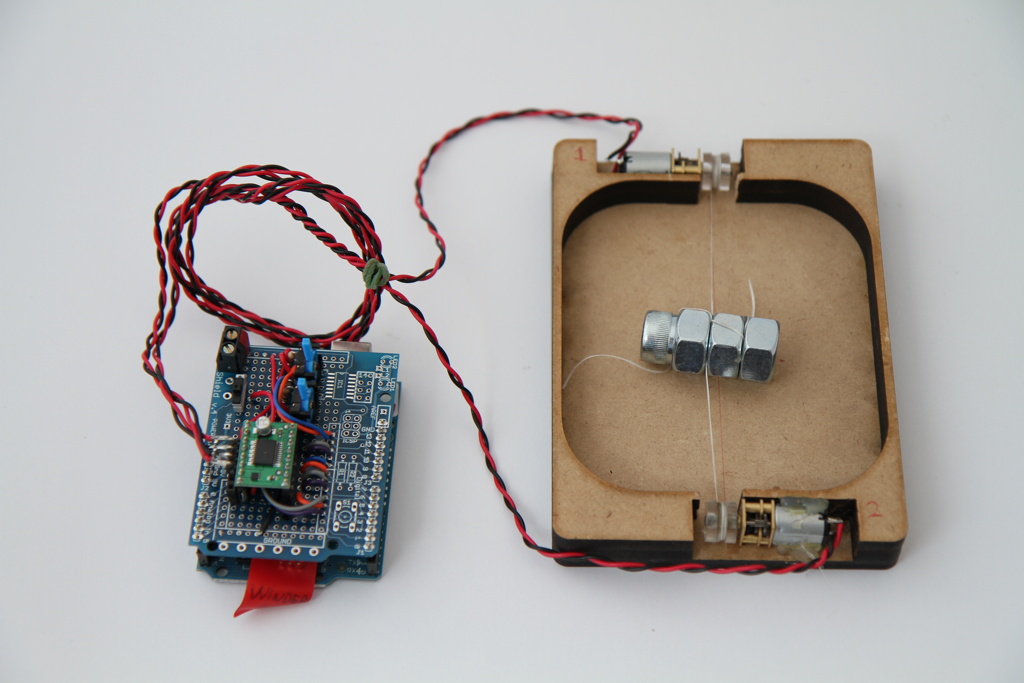
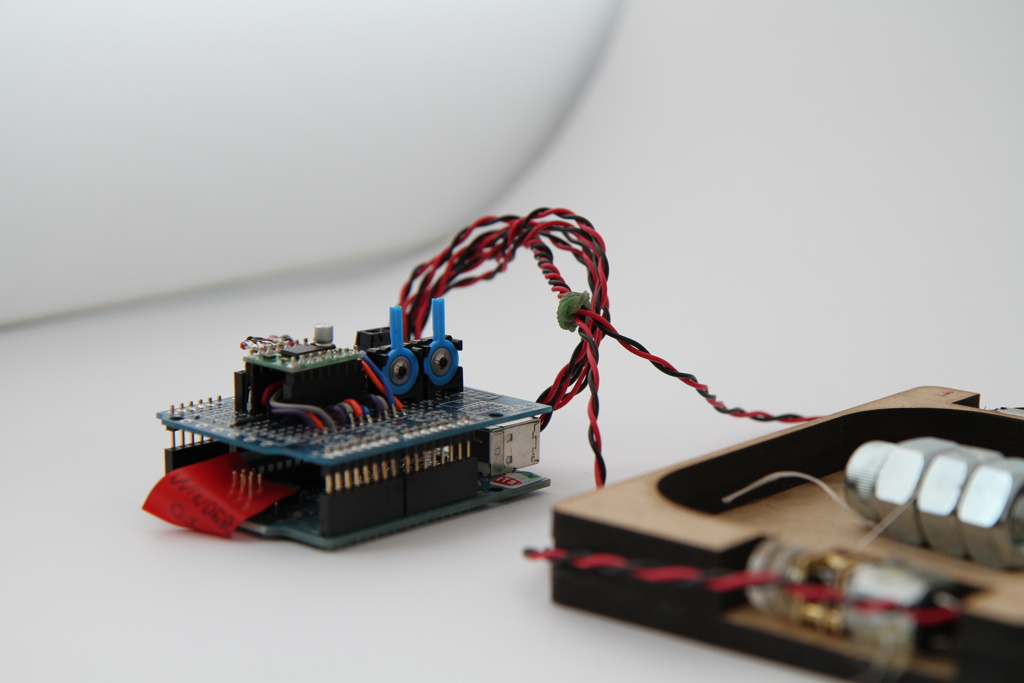
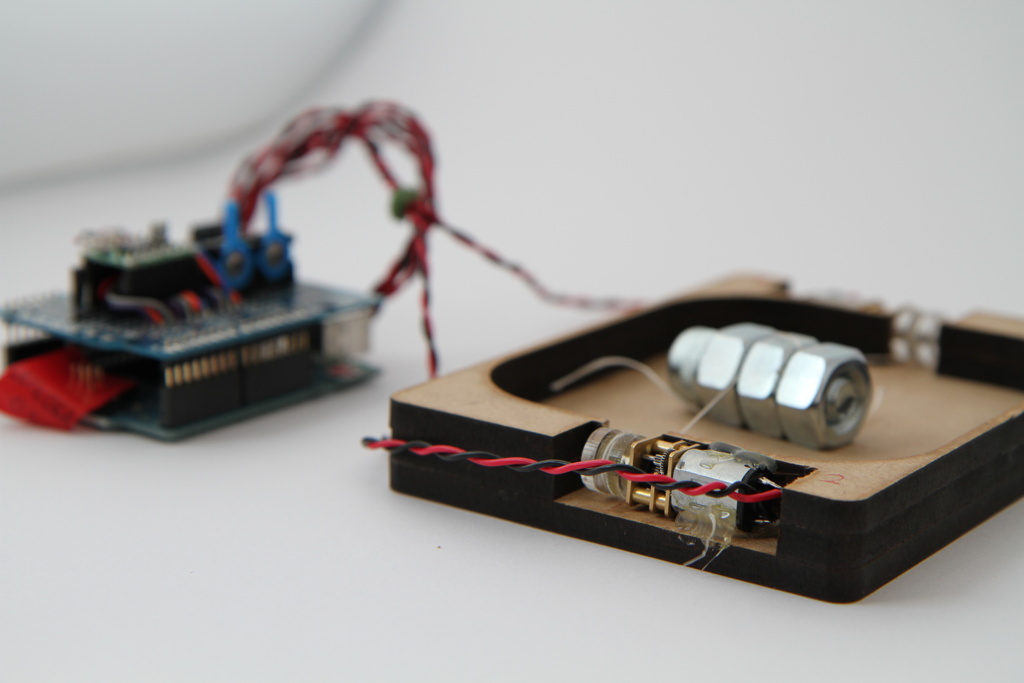
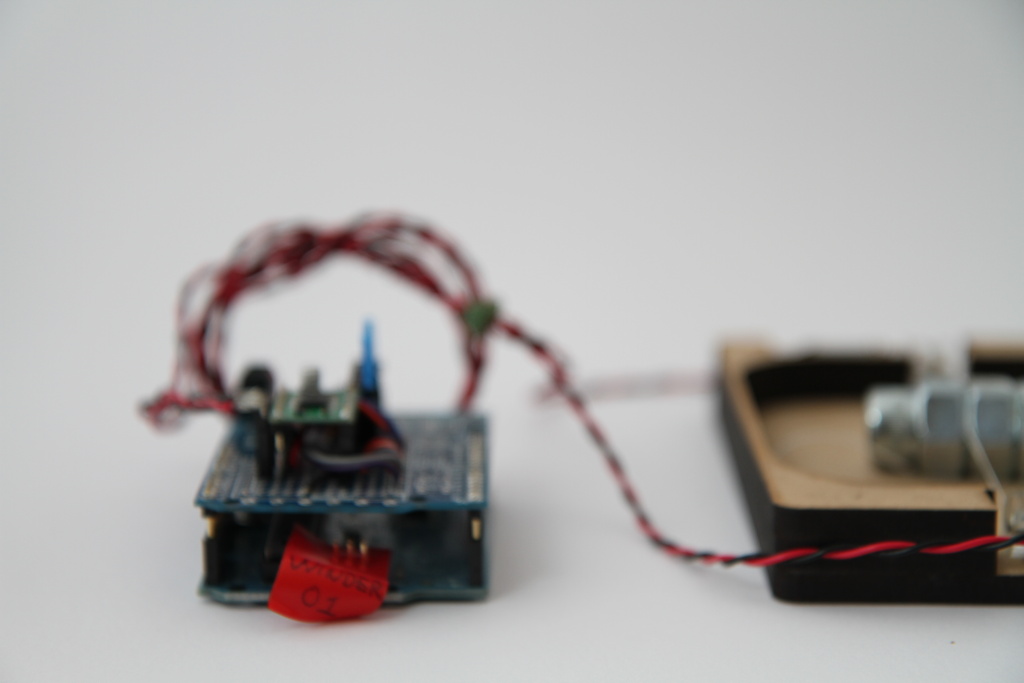
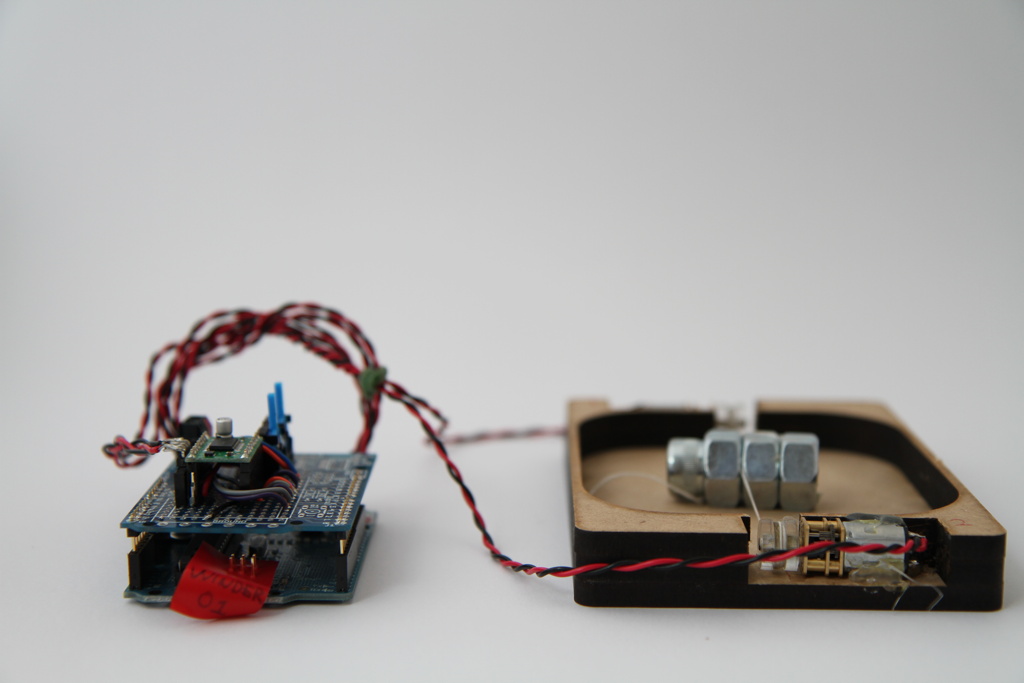
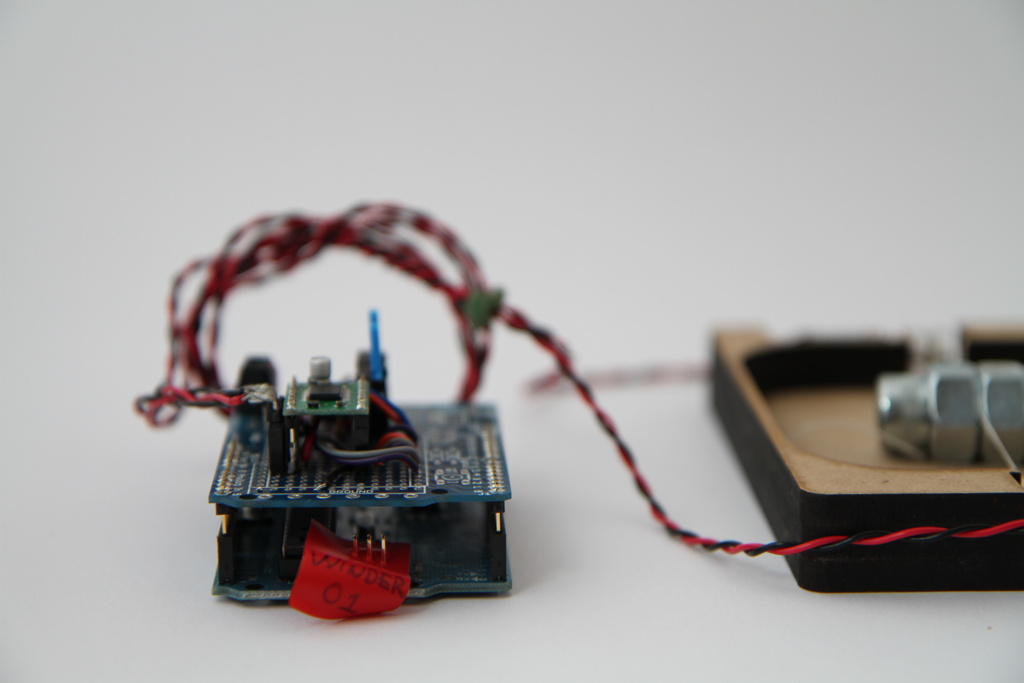
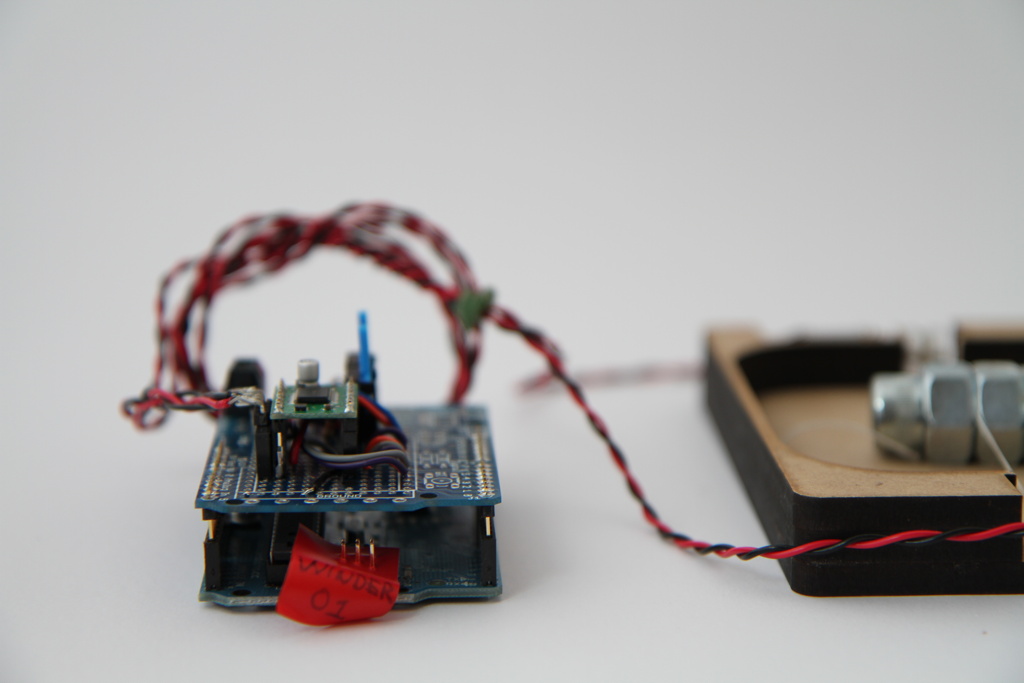
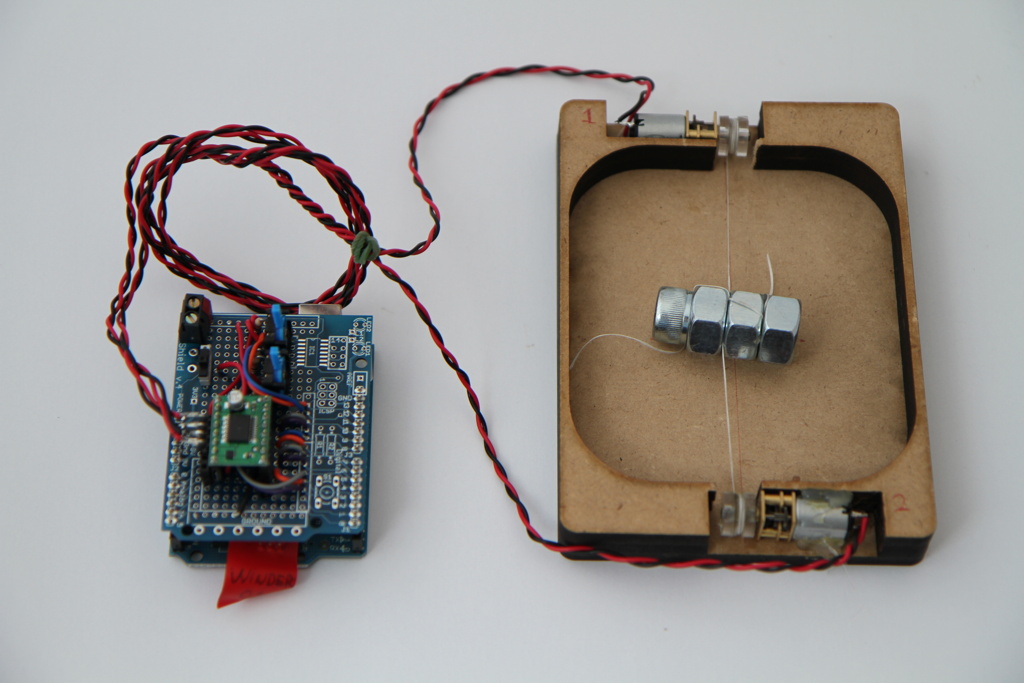
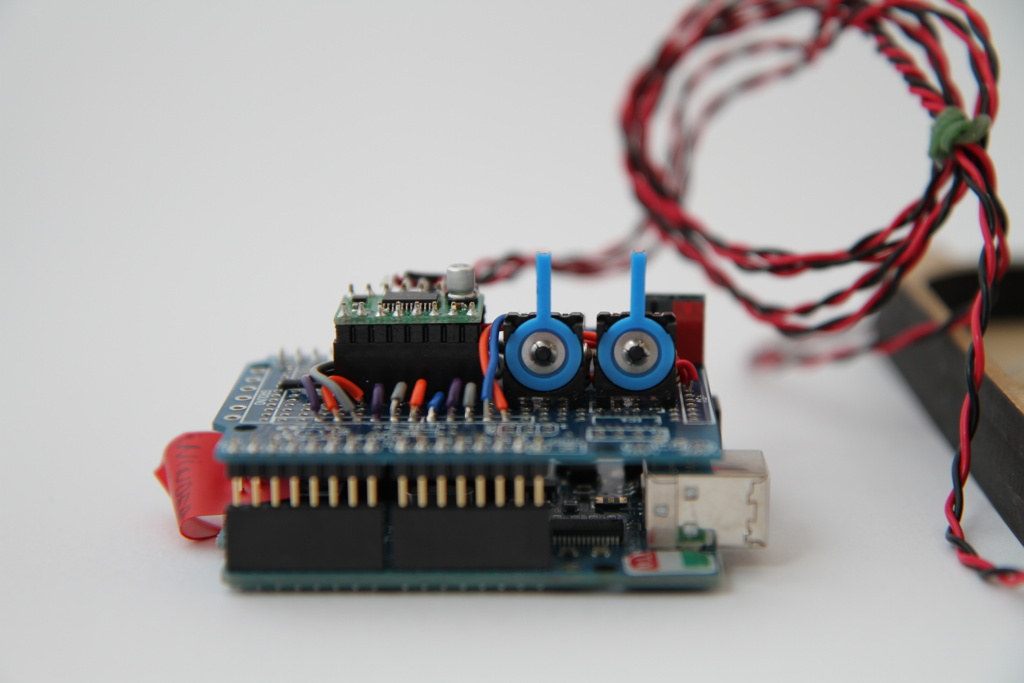
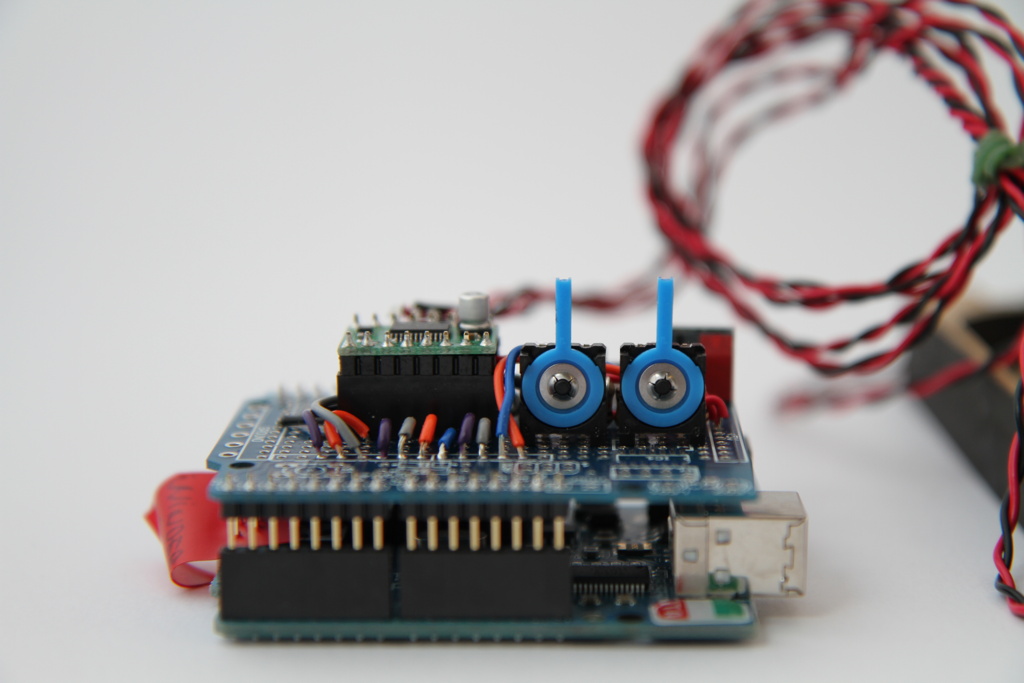
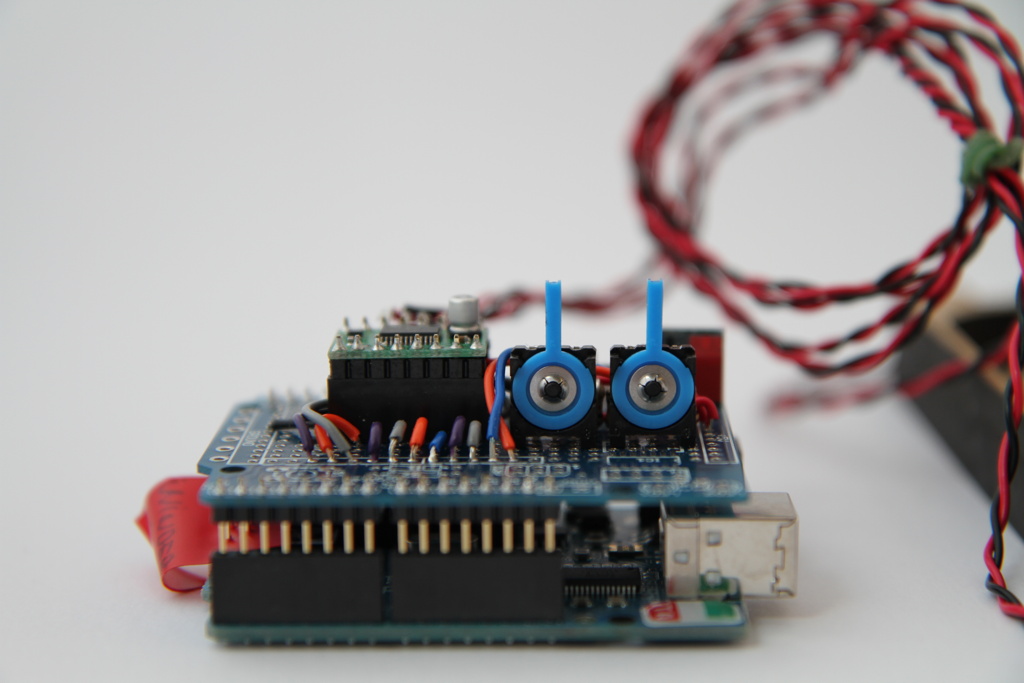
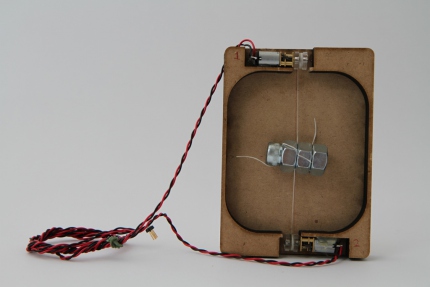
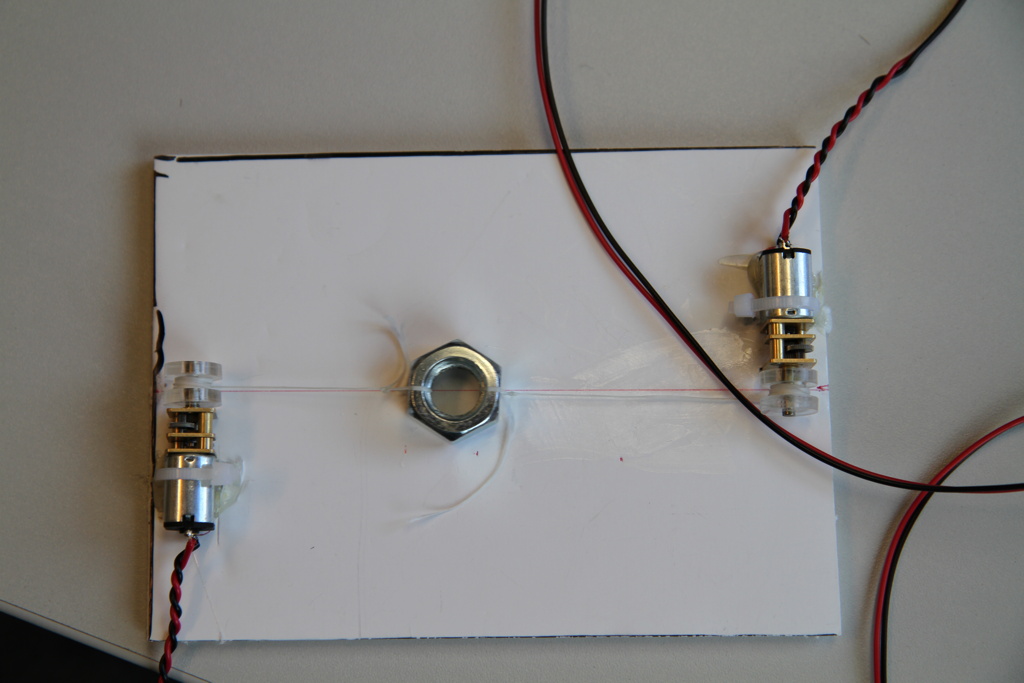
Winder 01
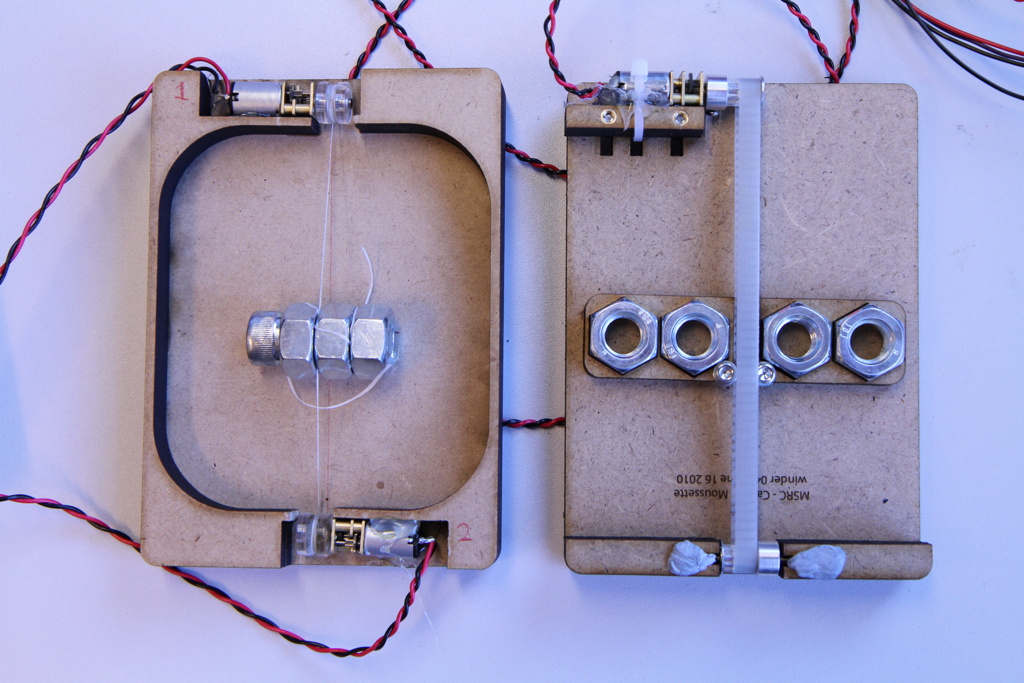
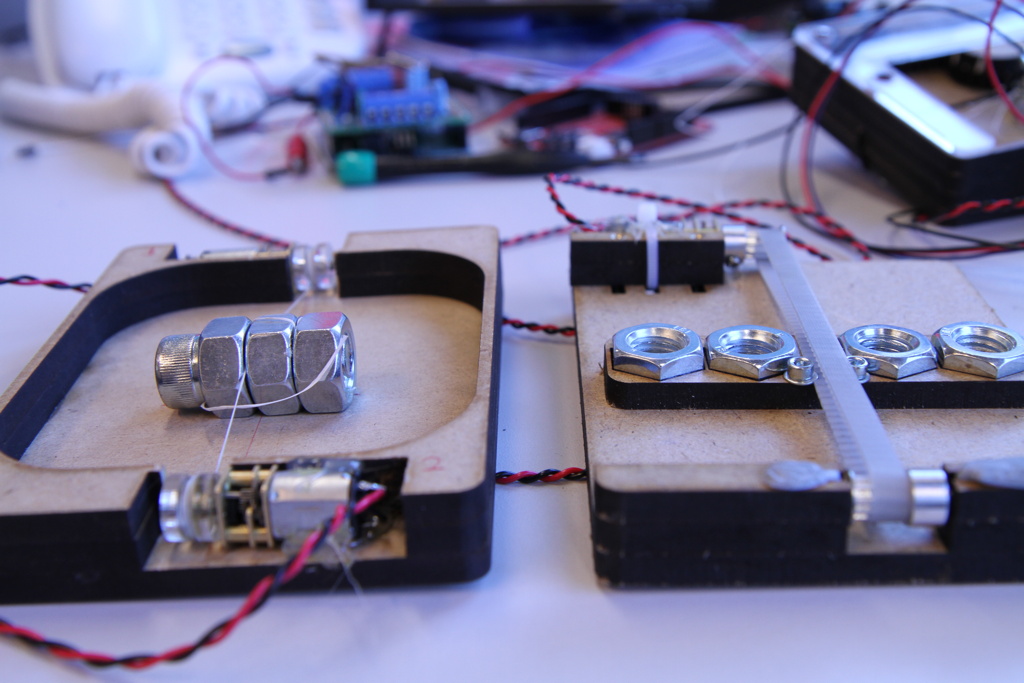
In this first iteration, I'm using two motors to wind up/down the weight. By using this setup I can also build some tension in the lines, or release both of them to let the weight go.
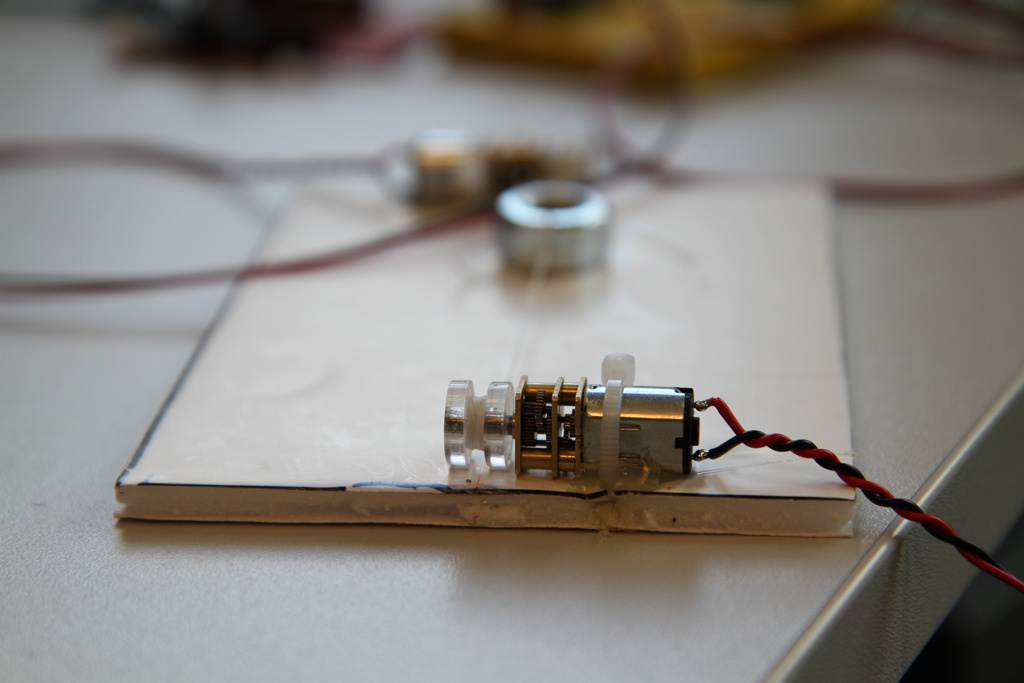
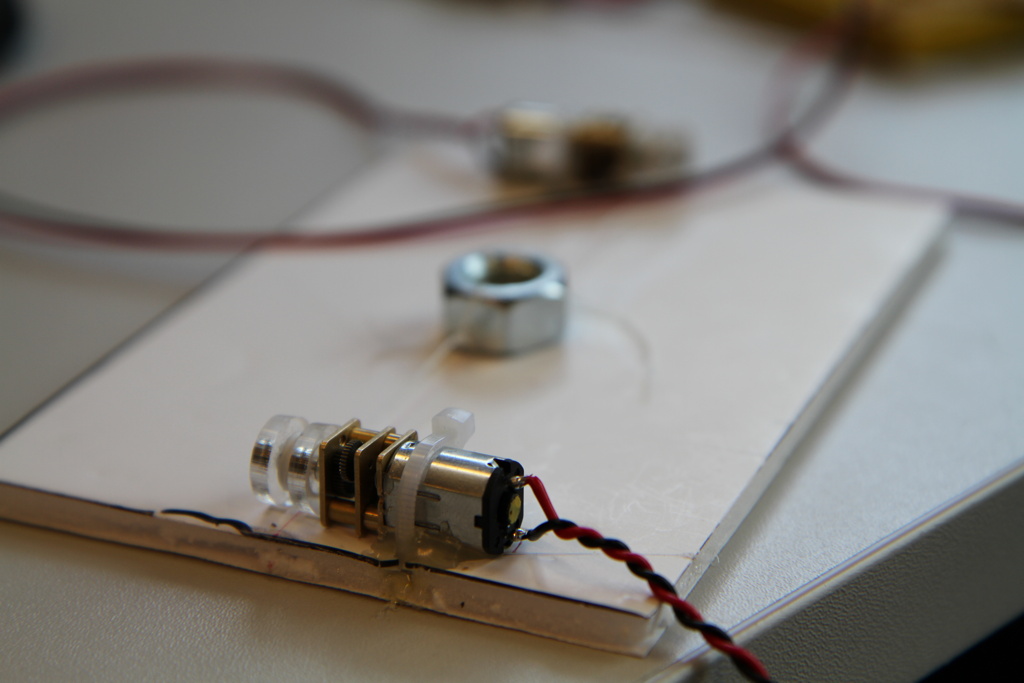
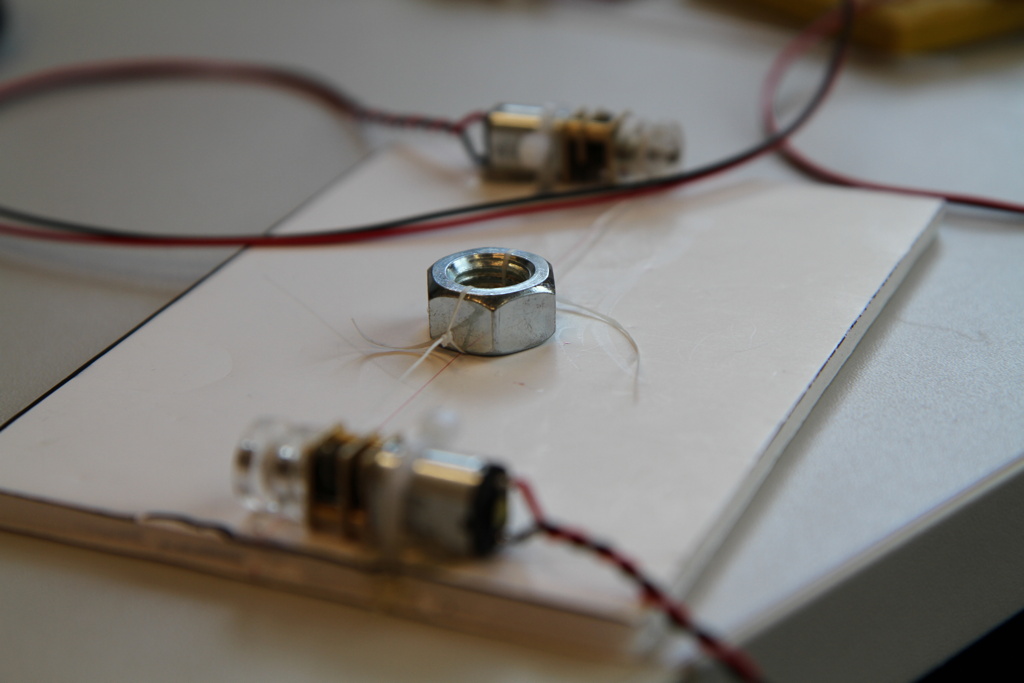
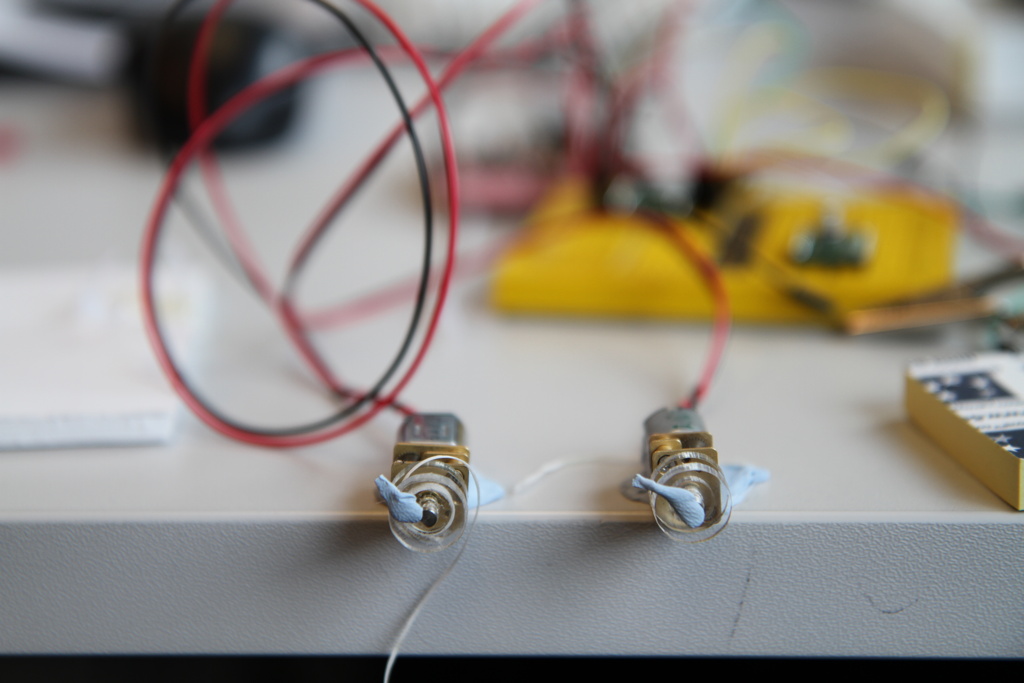
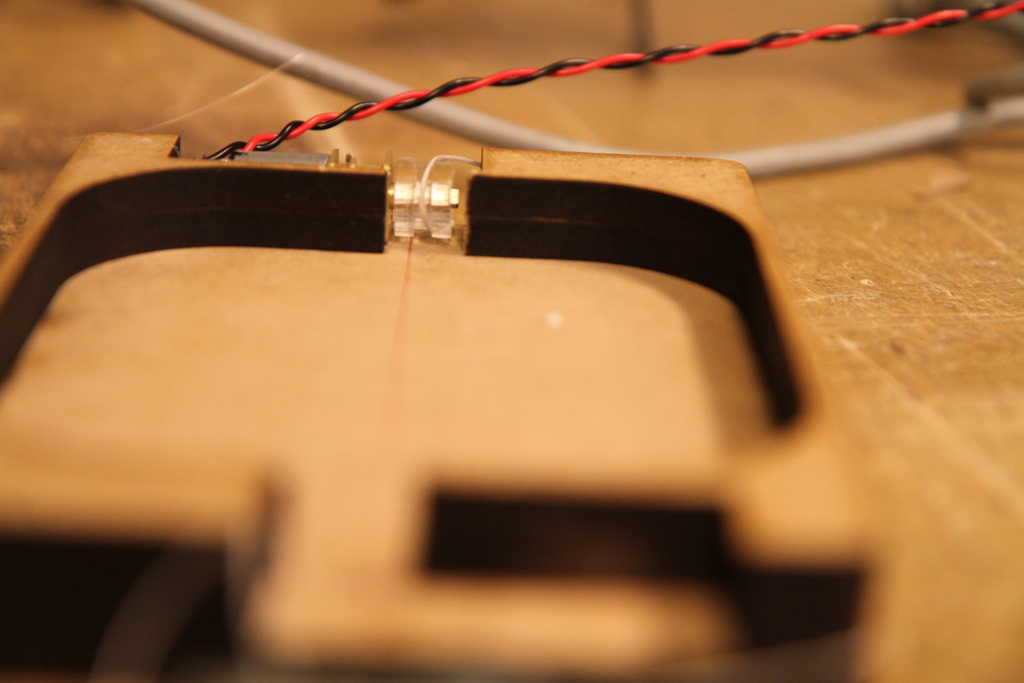
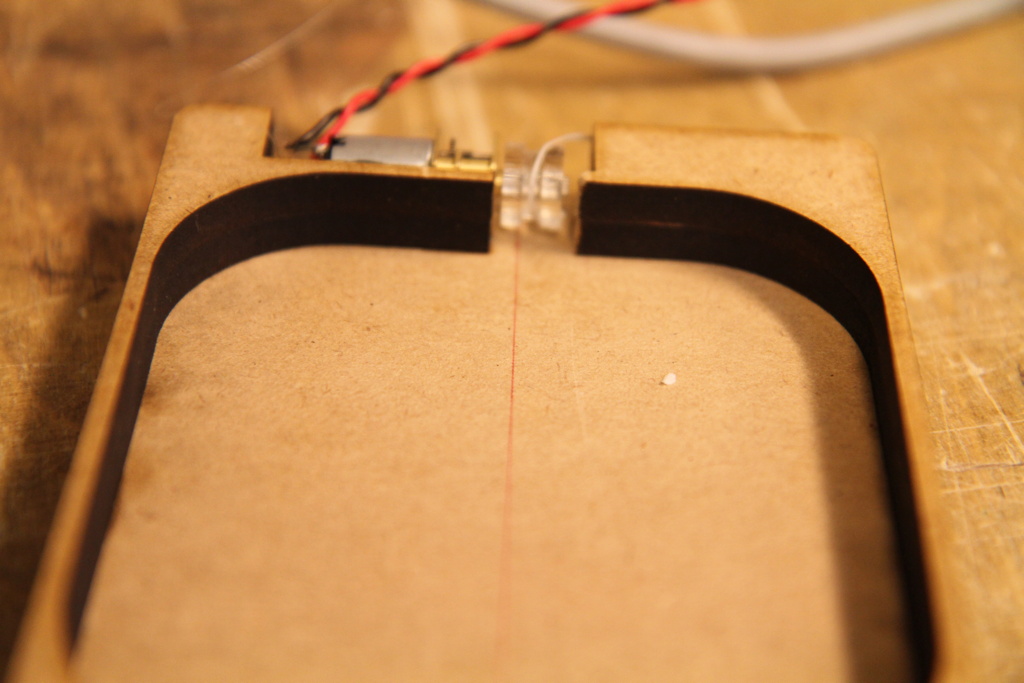
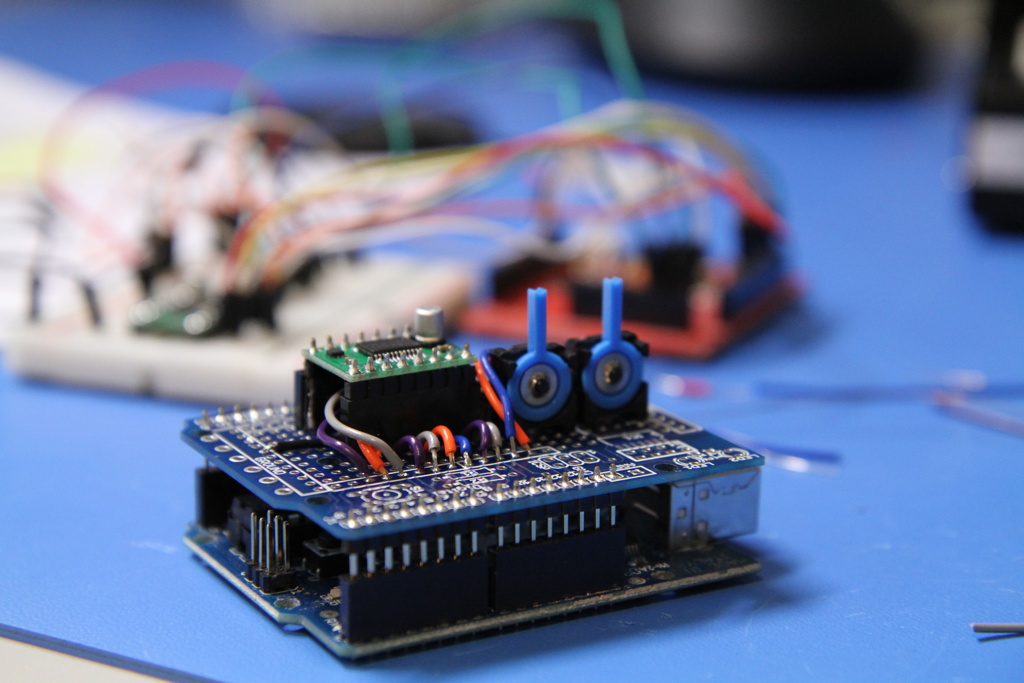
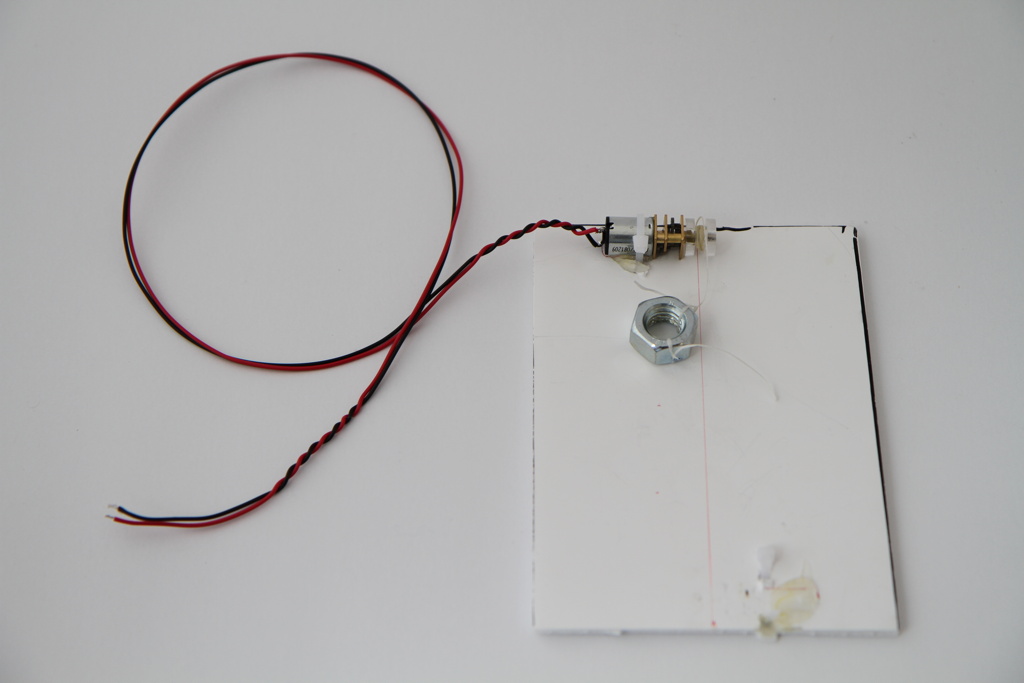
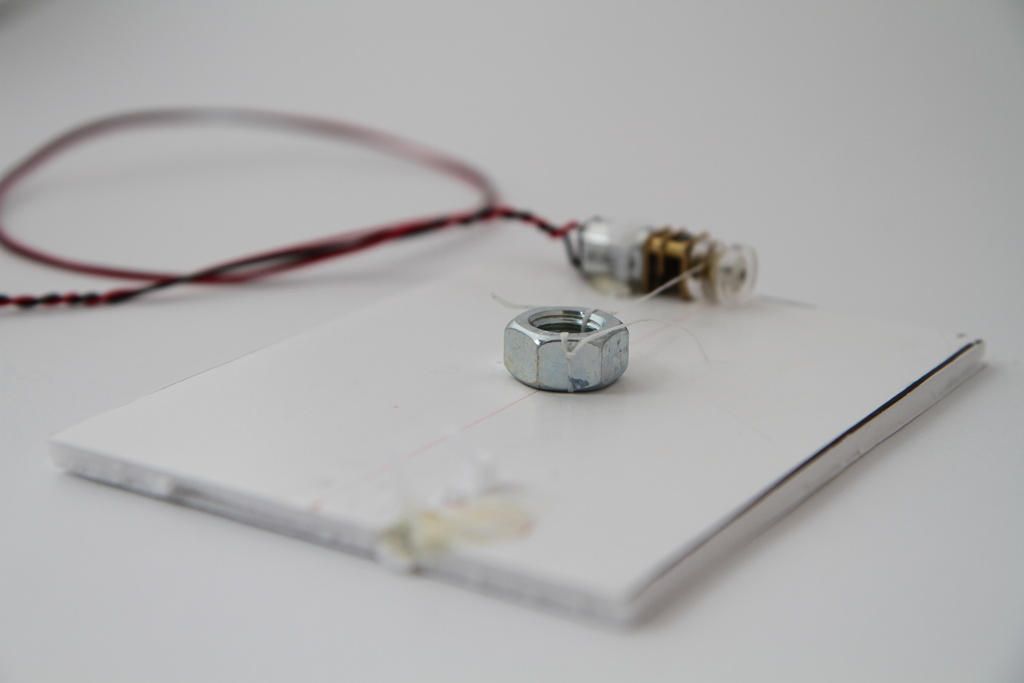
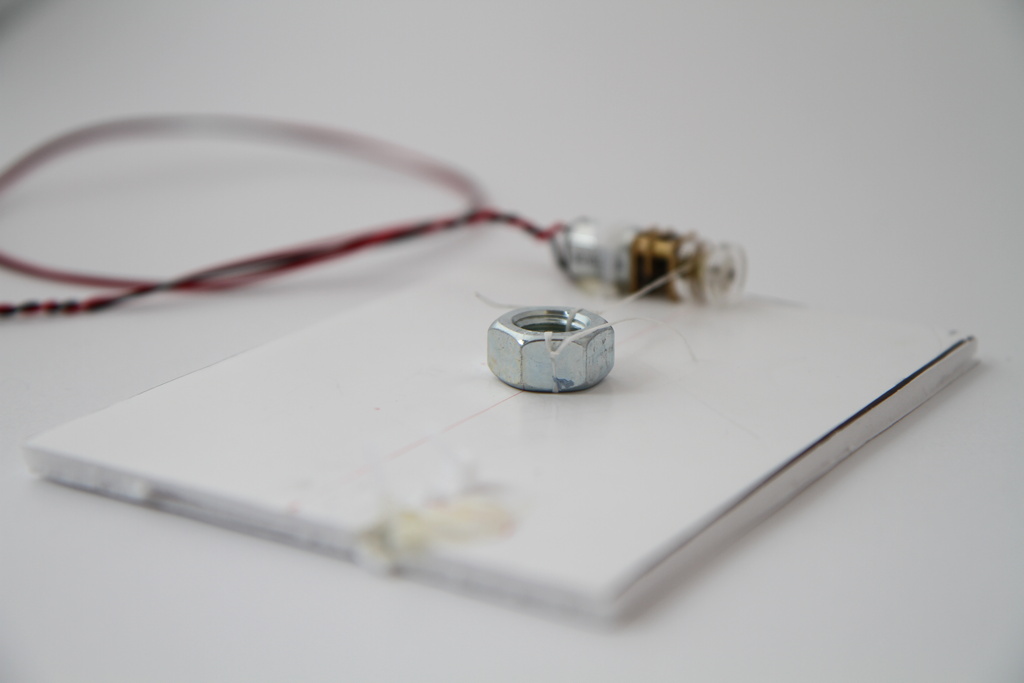
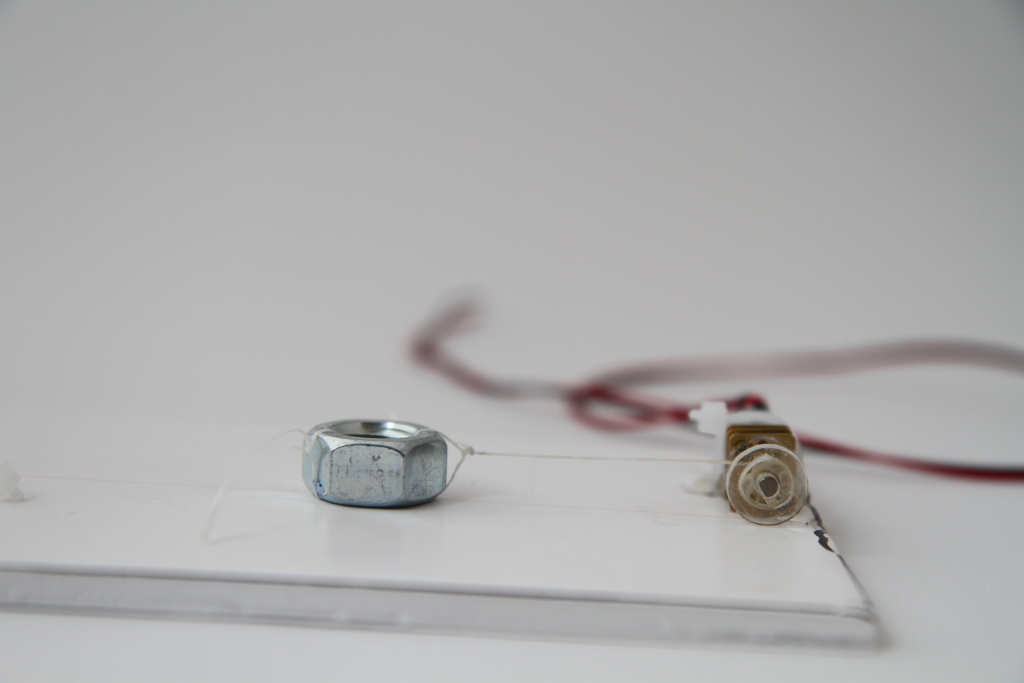
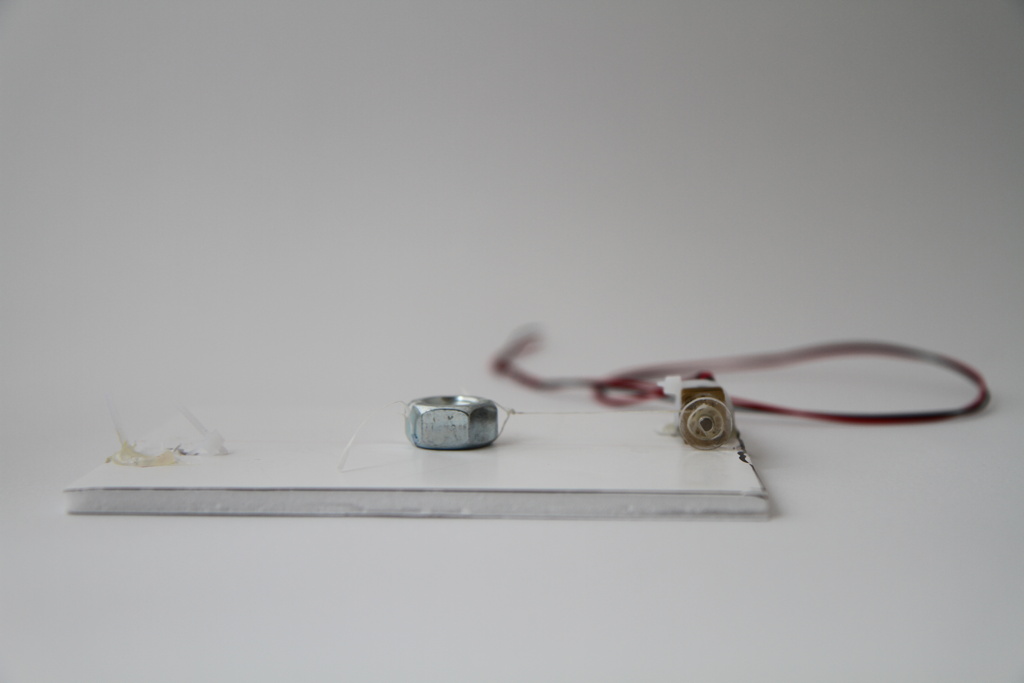
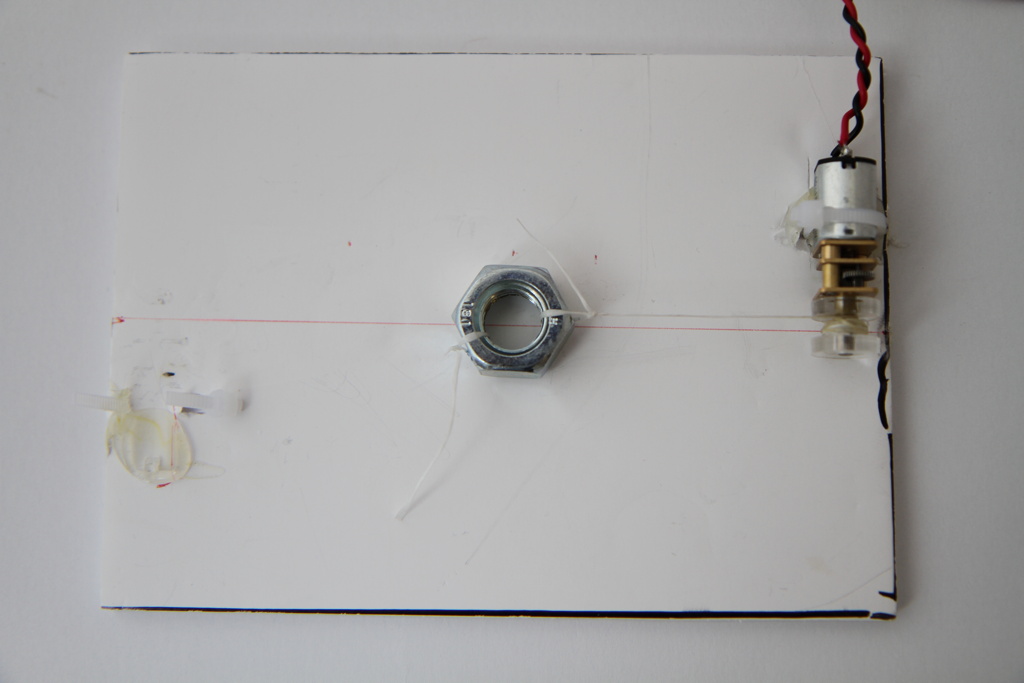
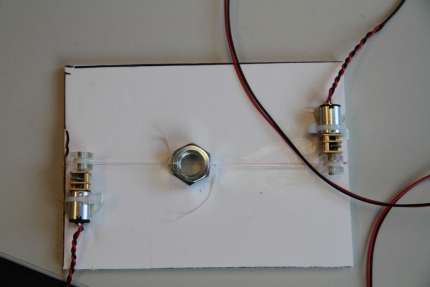
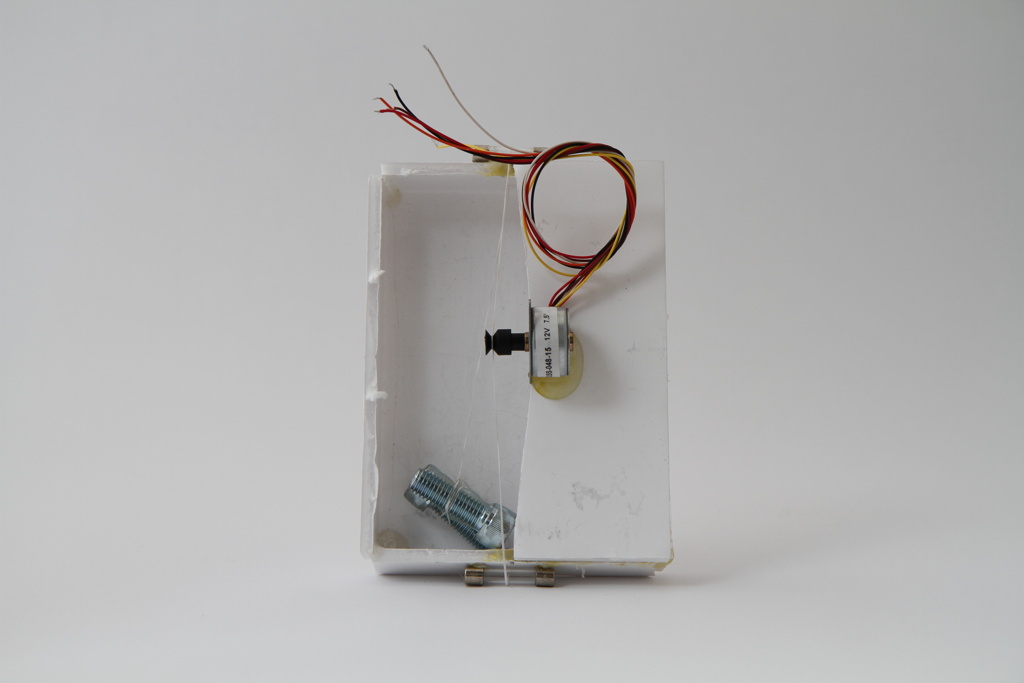
Winder 02
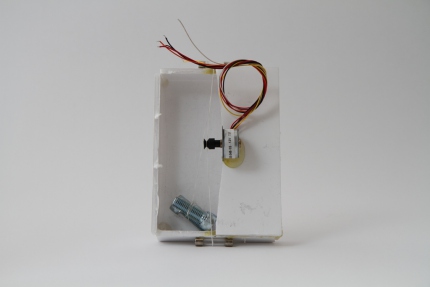
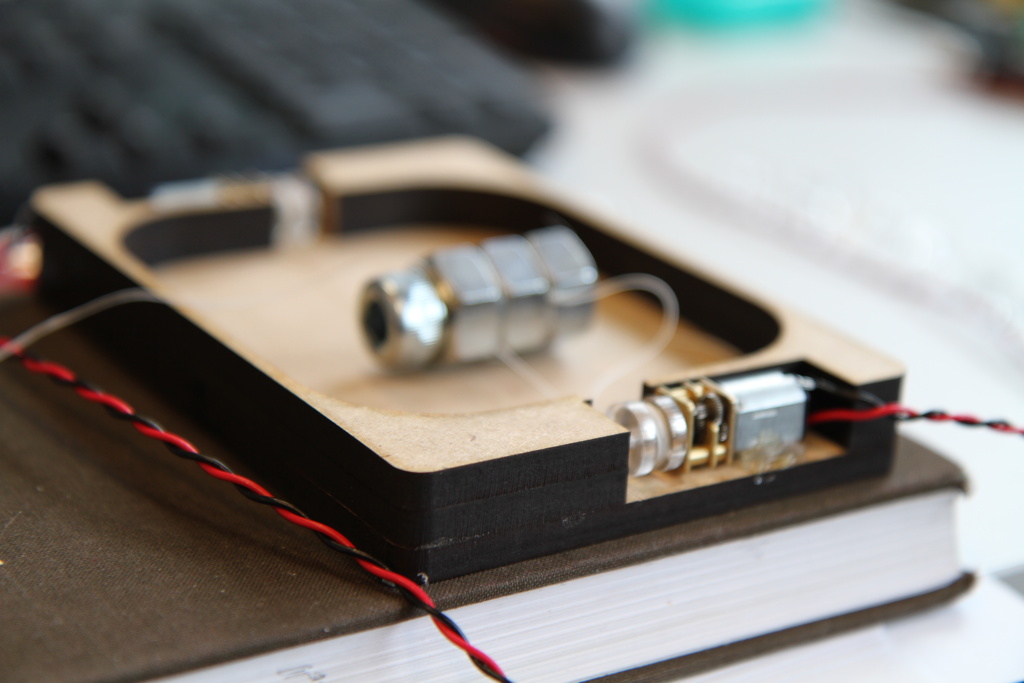
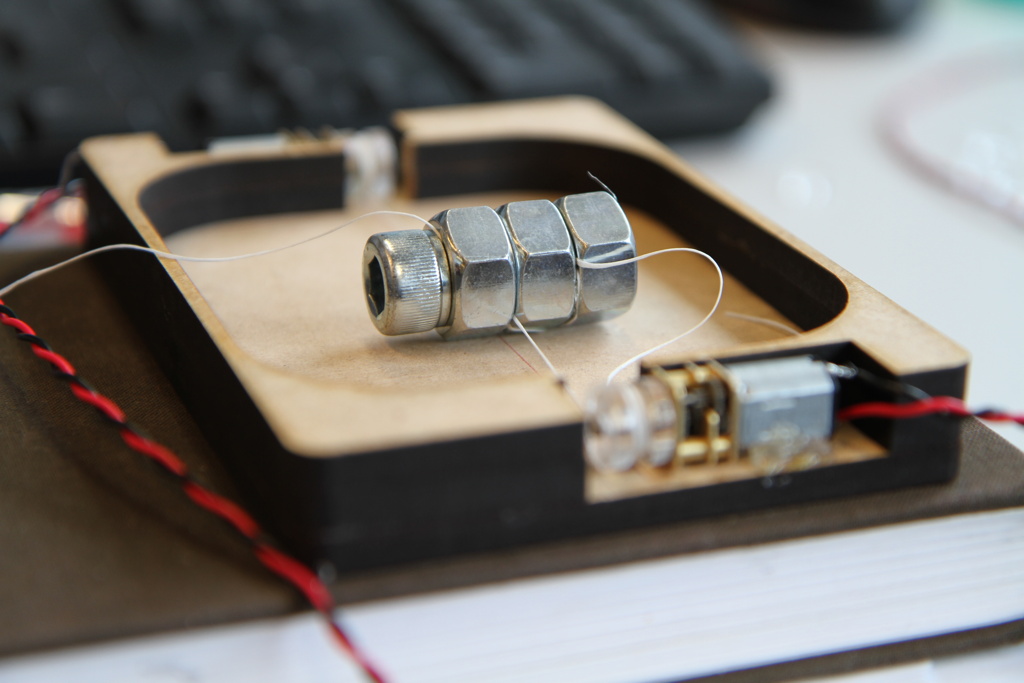
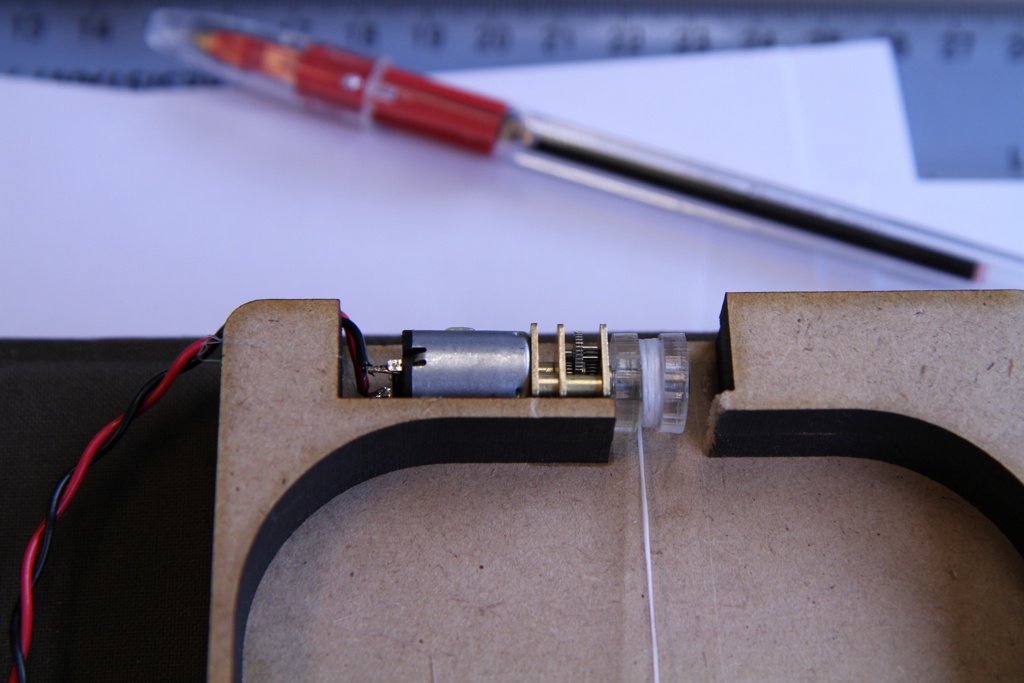
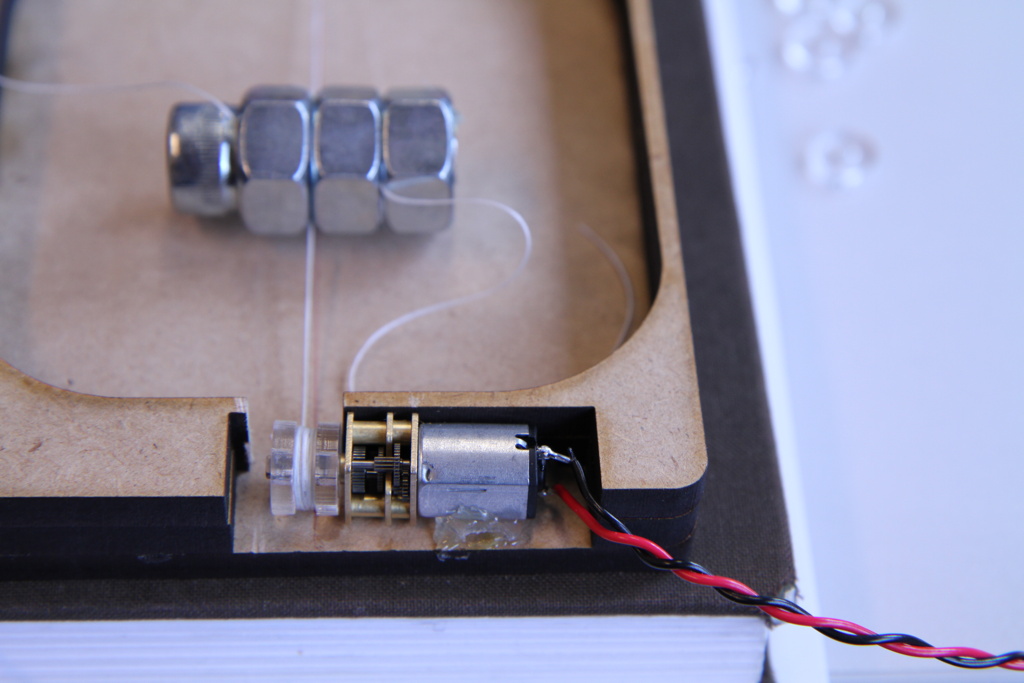
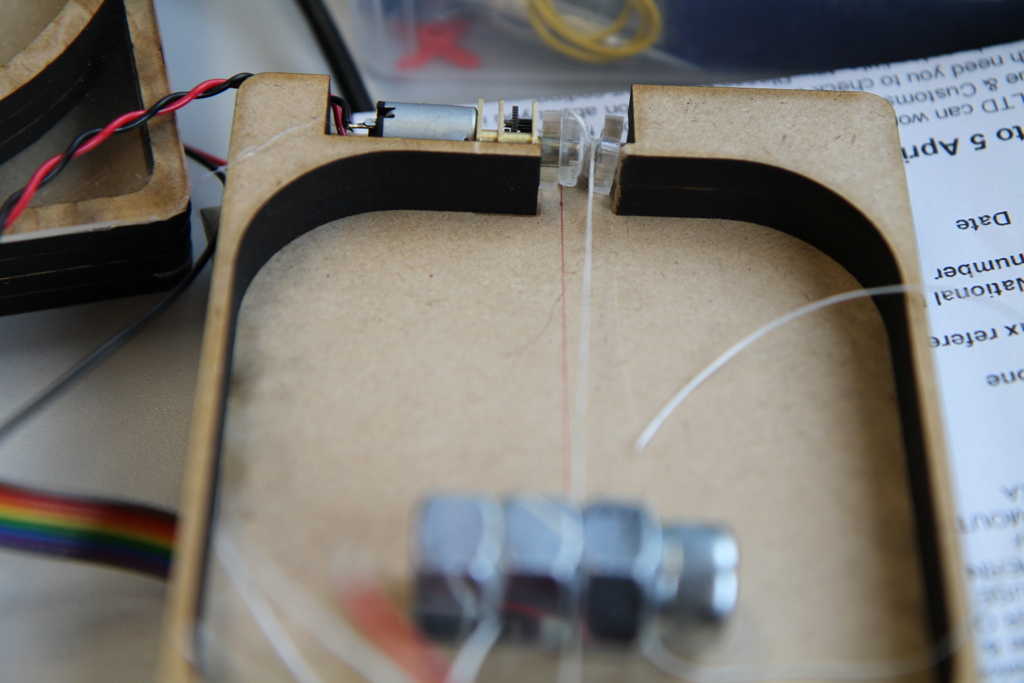
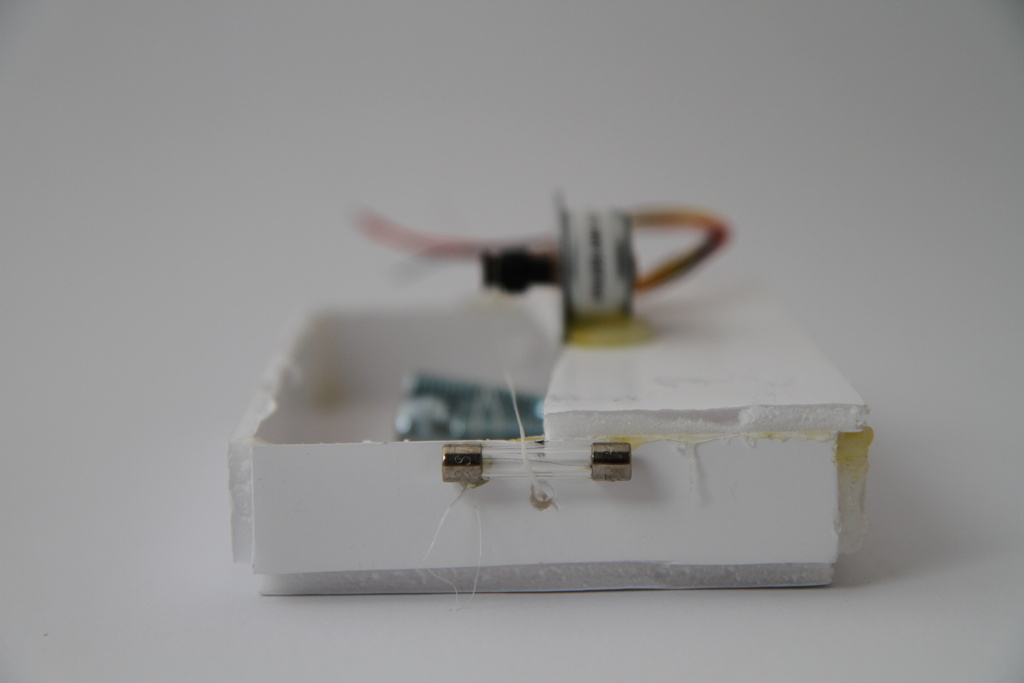
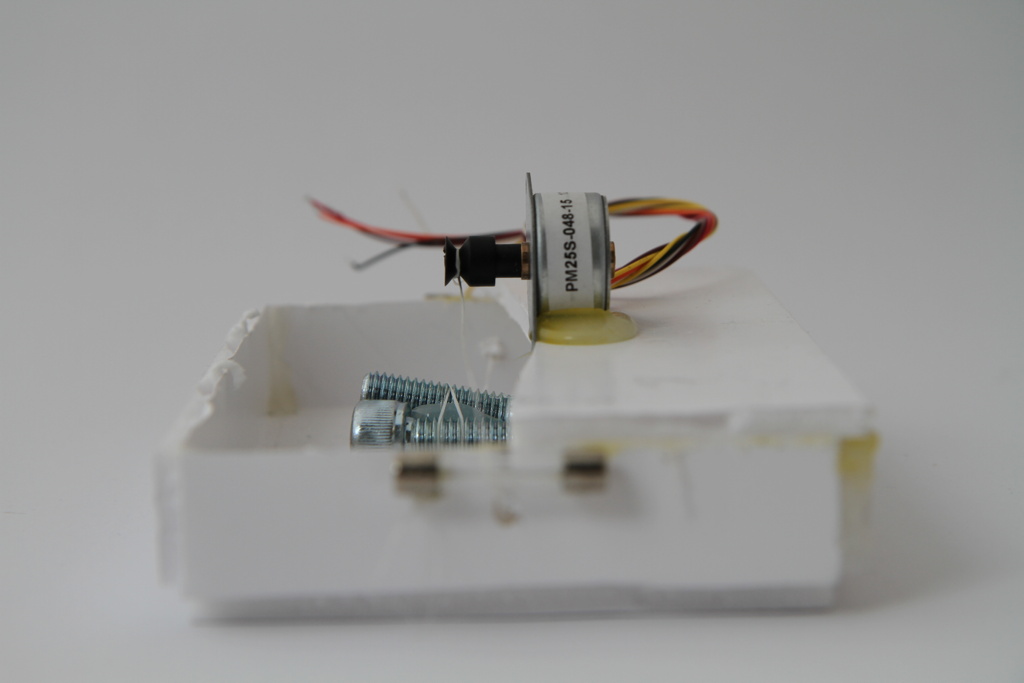
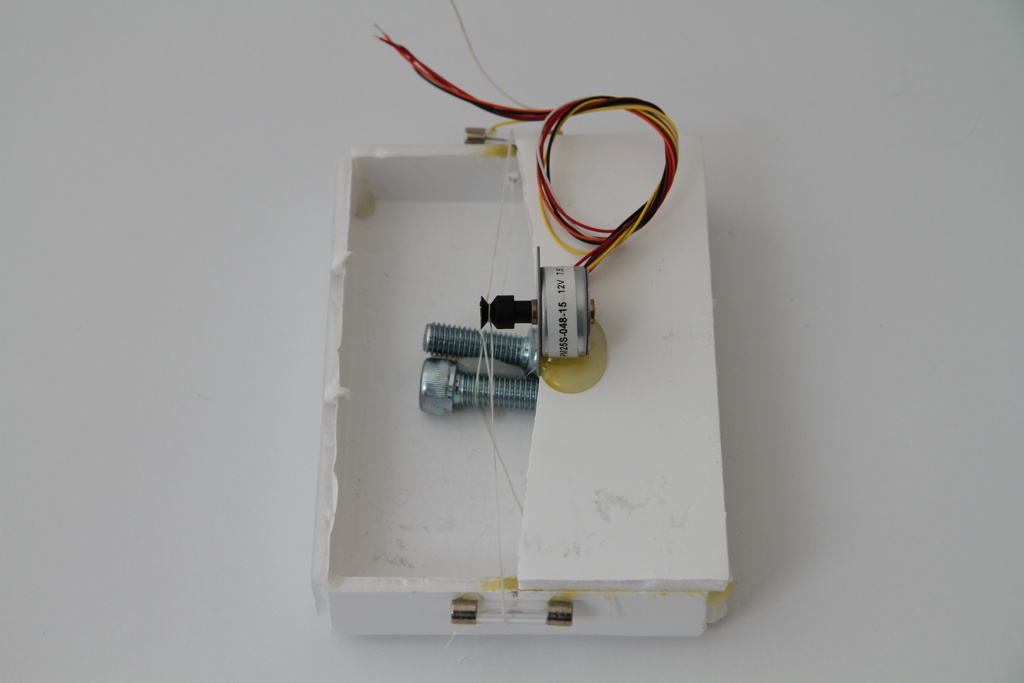
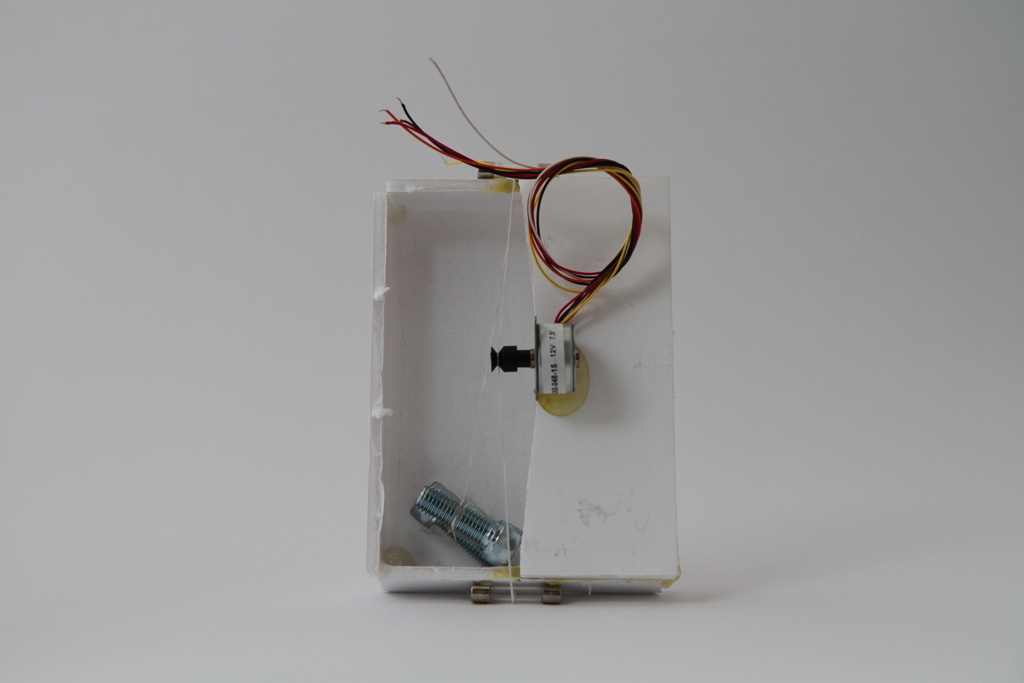
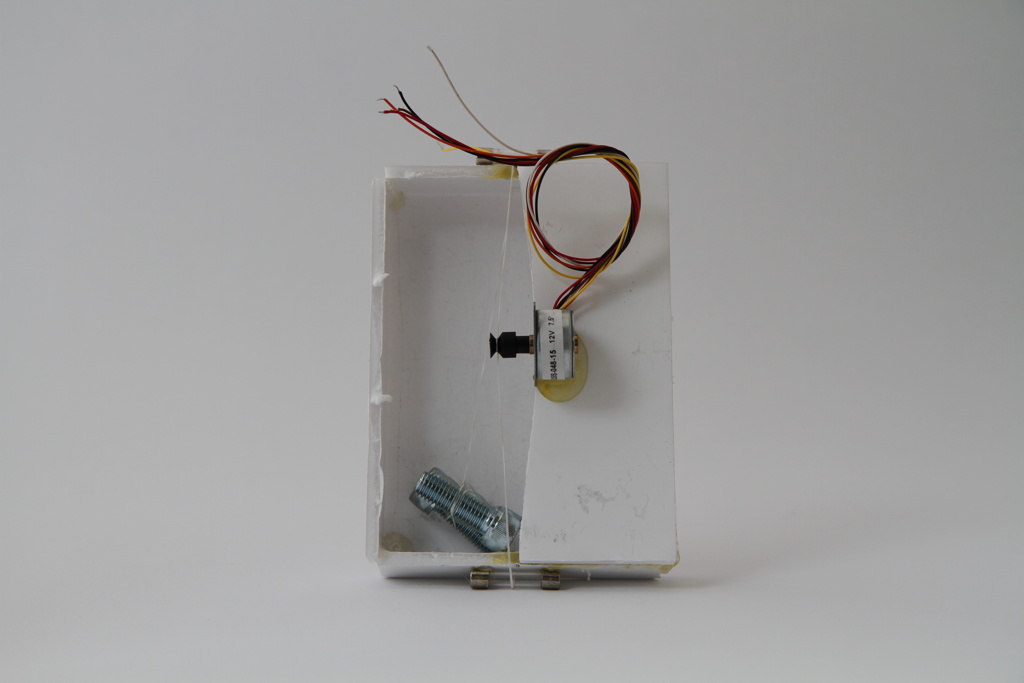
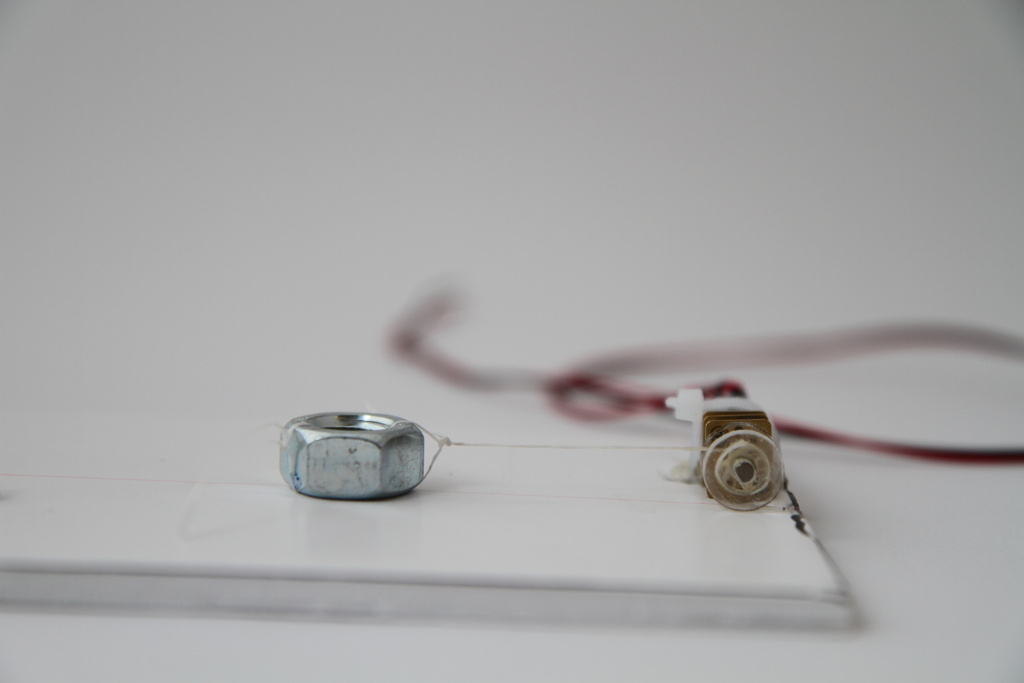
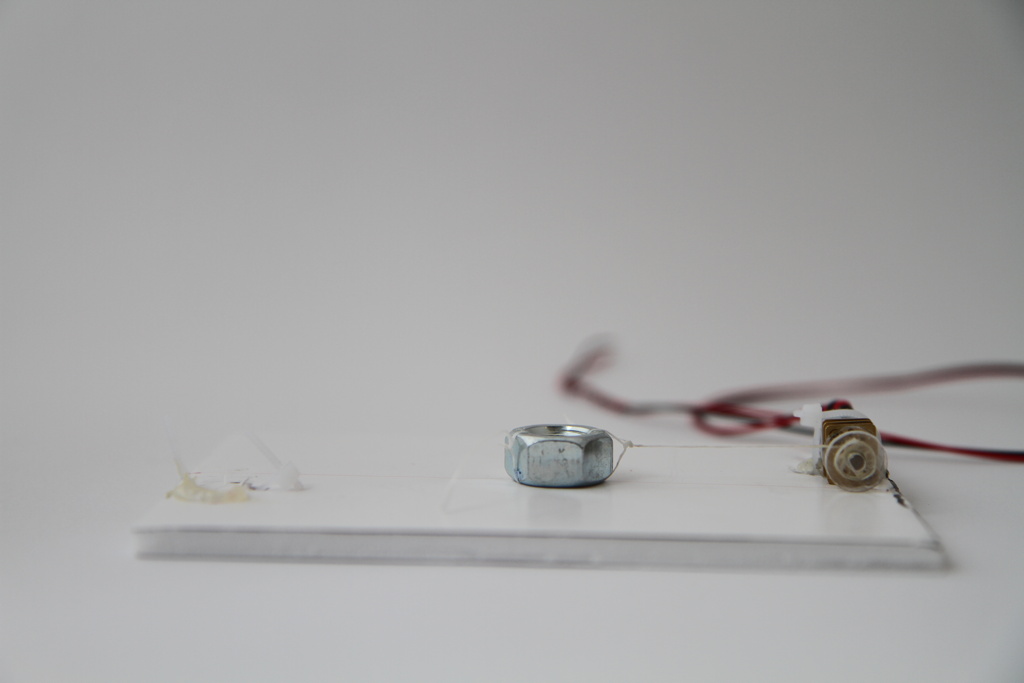
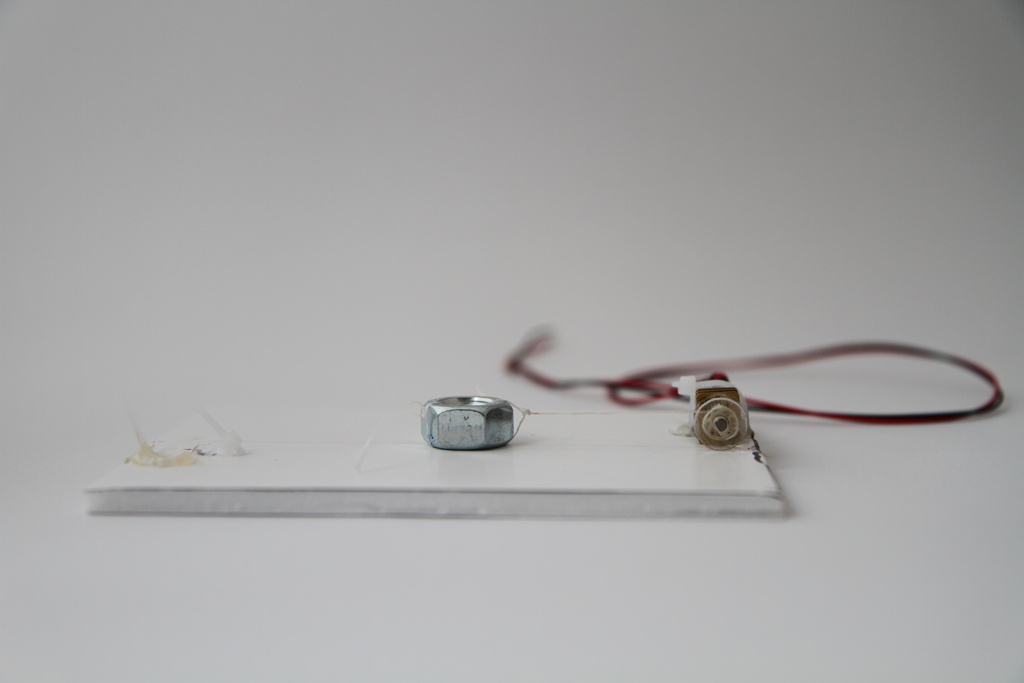
In this configuration, I'm trying to use only one motor, with the line wrapped around a pulley. The grip was very weak, so most of the time, the motor was spinning freely.
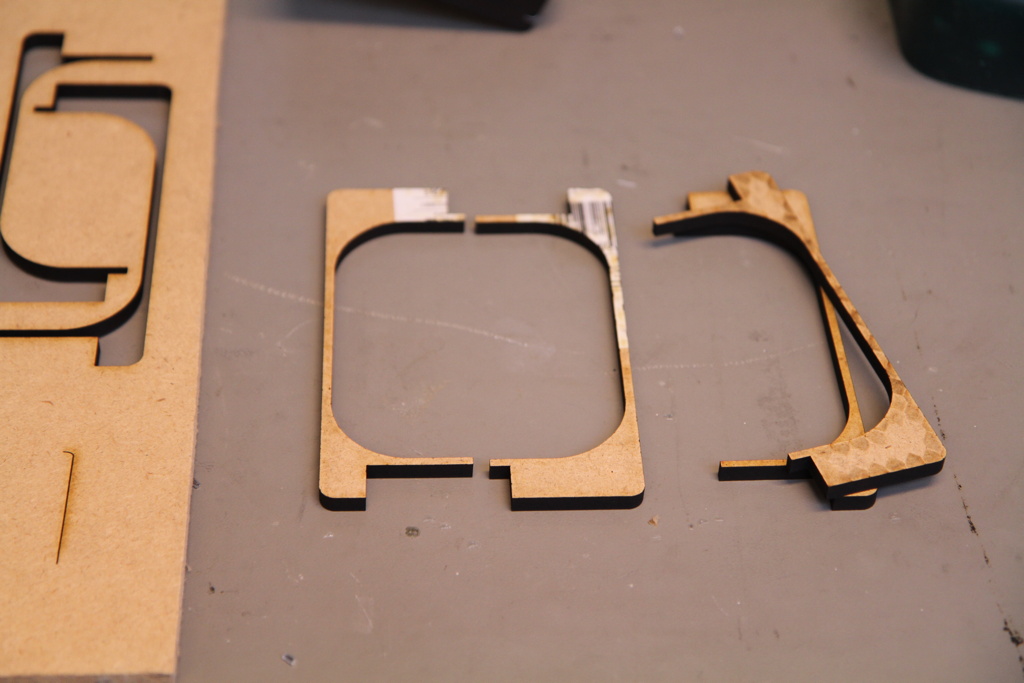
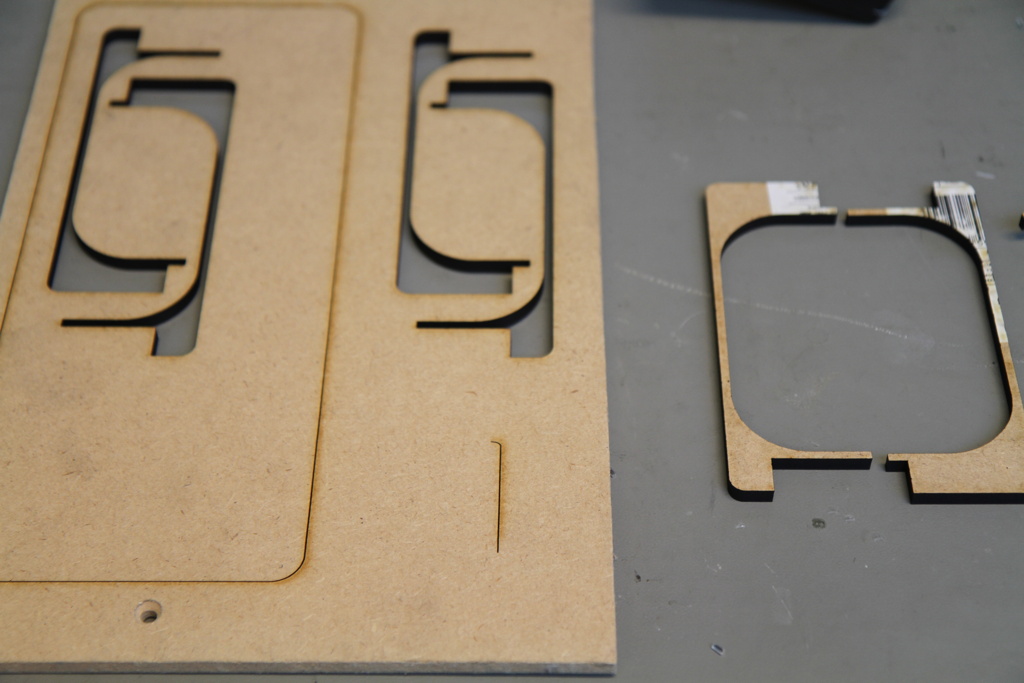
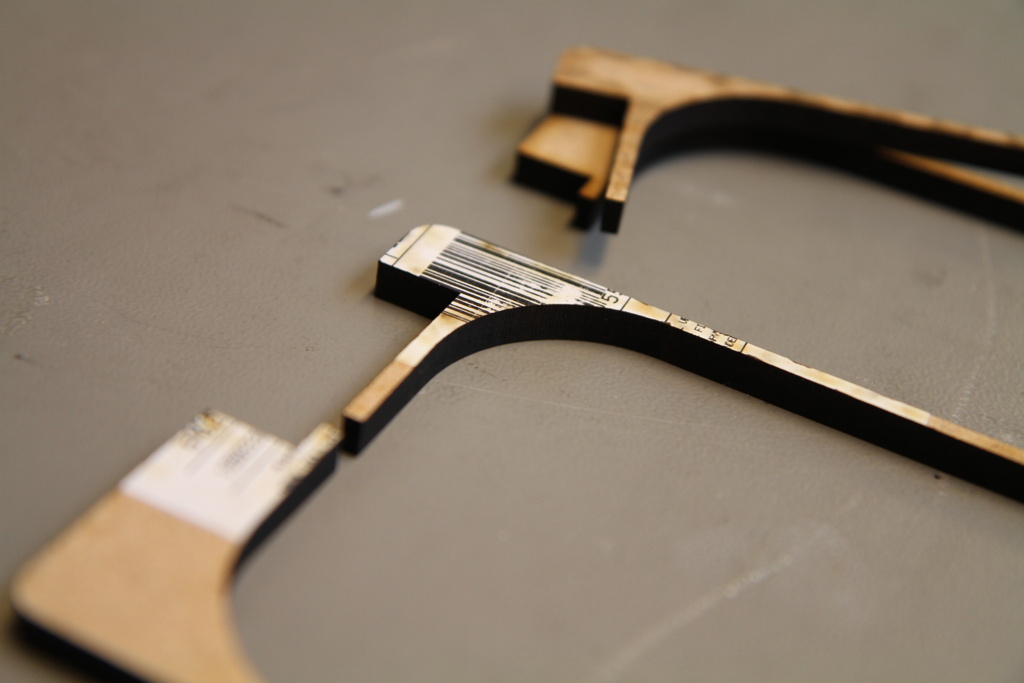
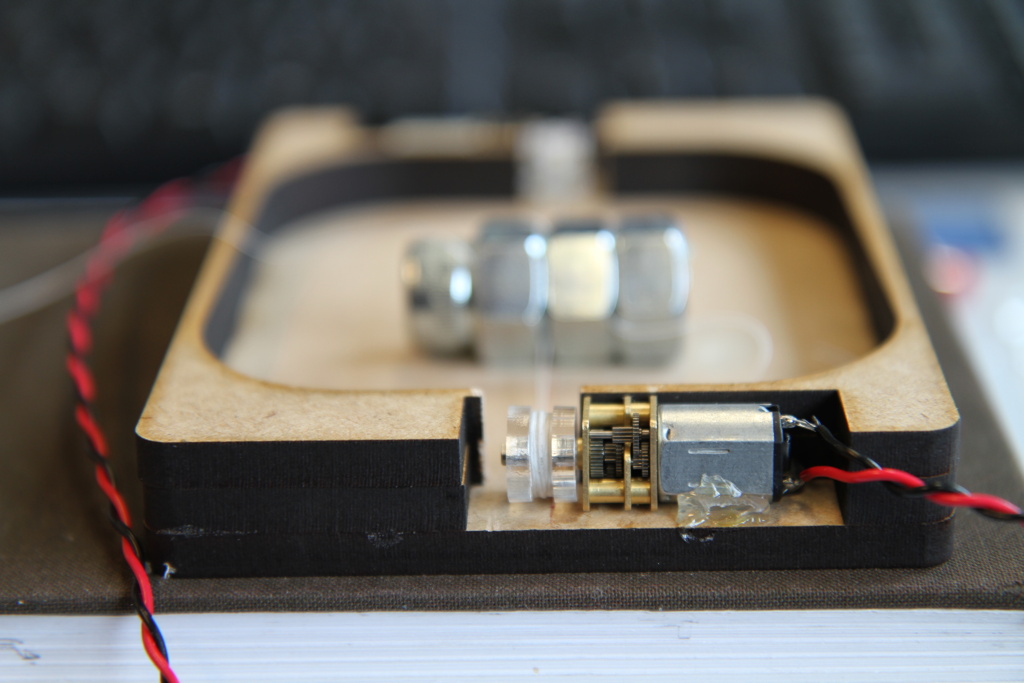
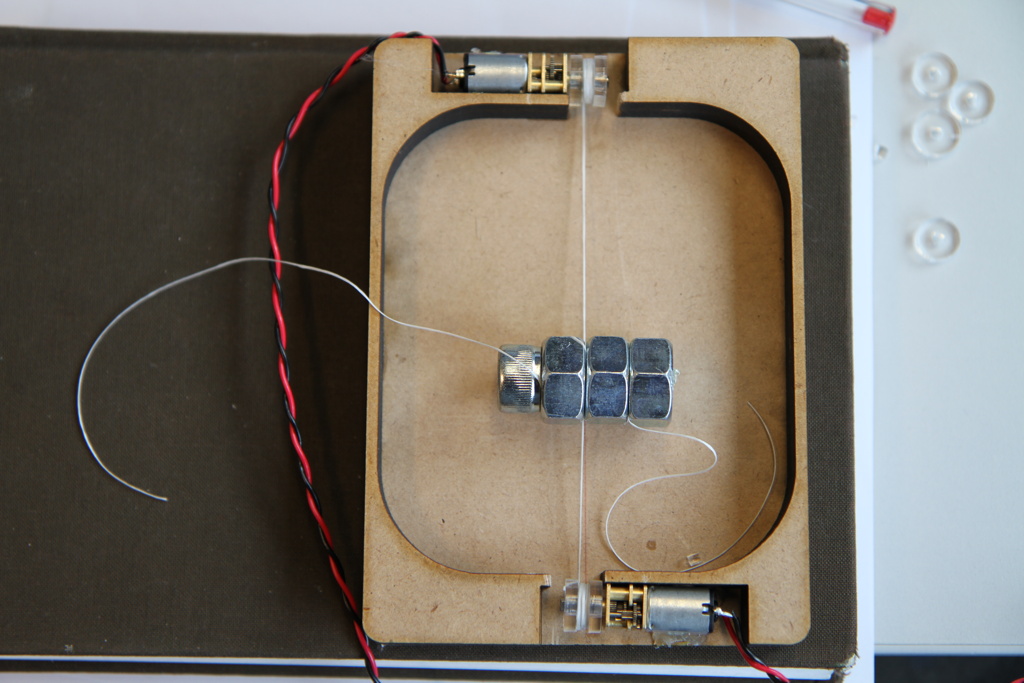
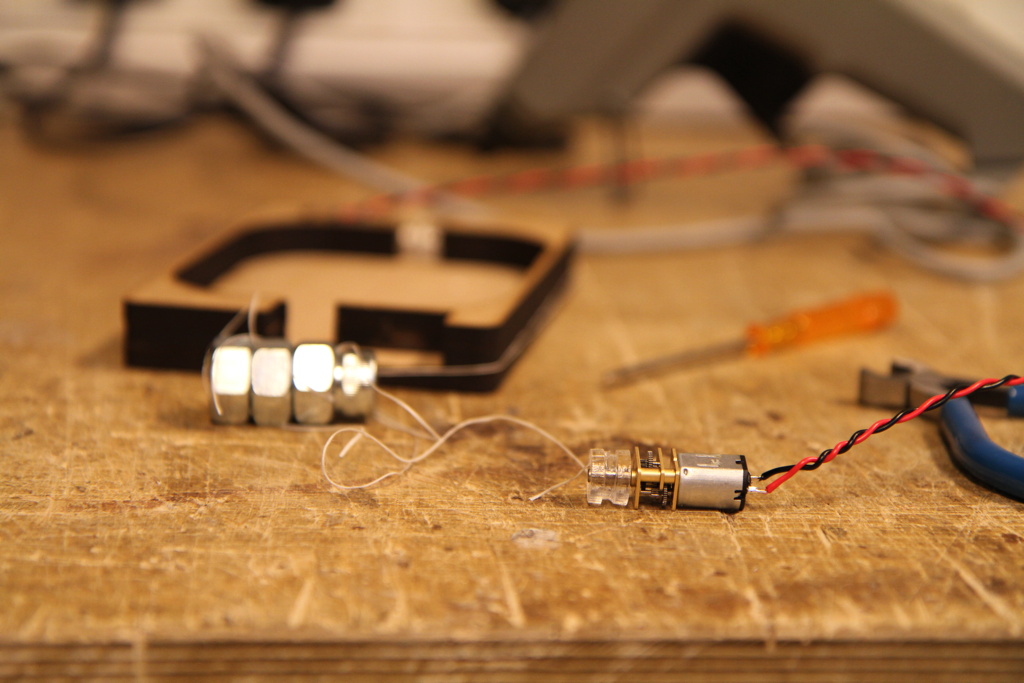
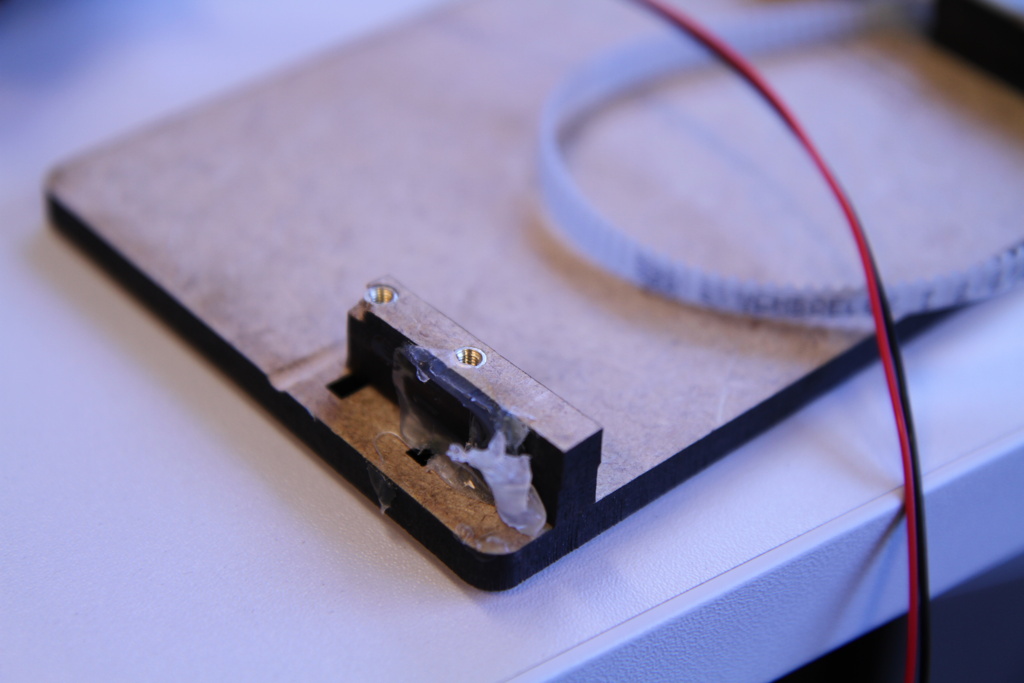
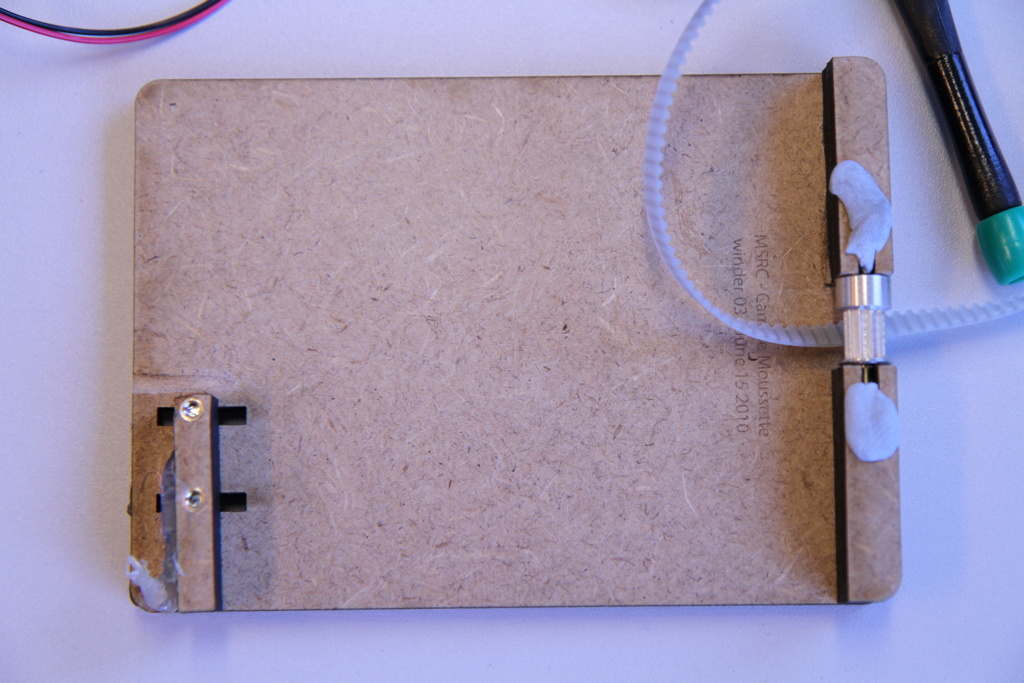
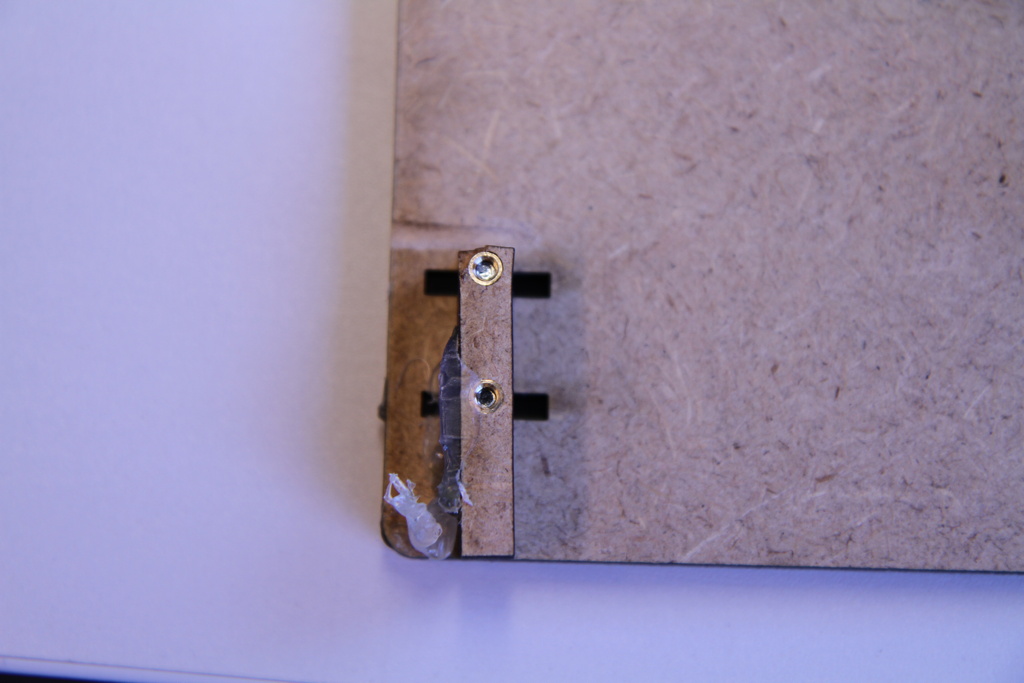
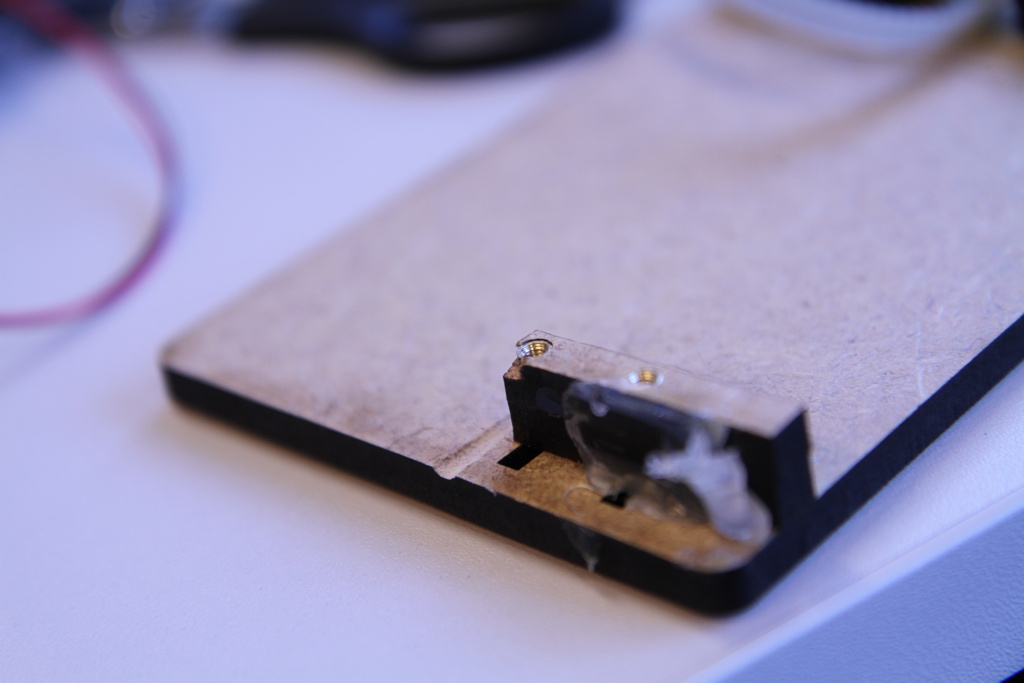
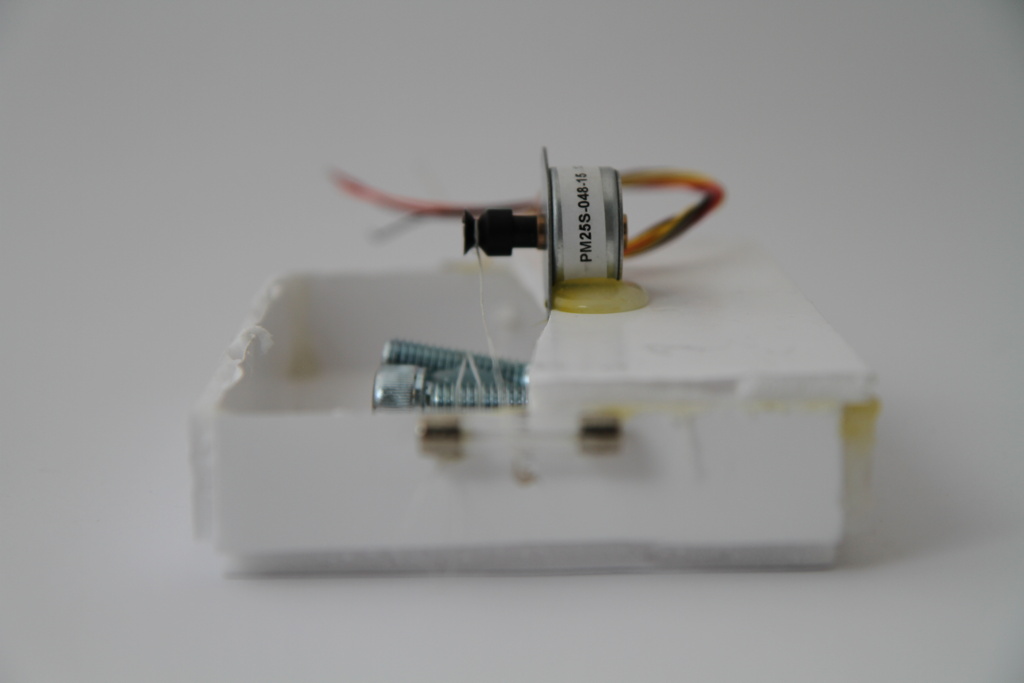
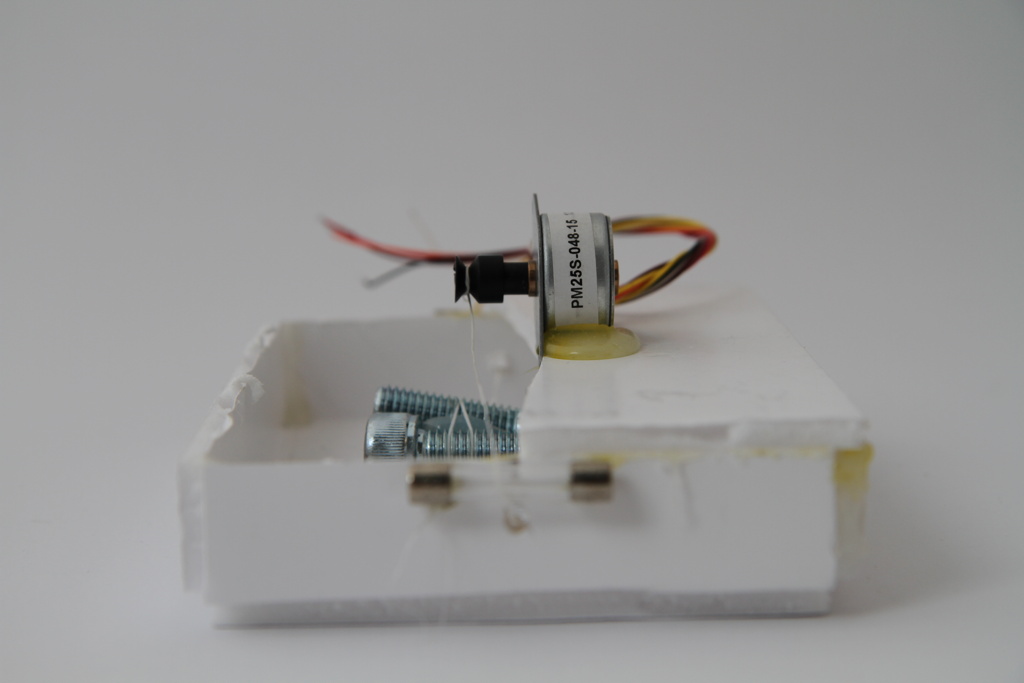
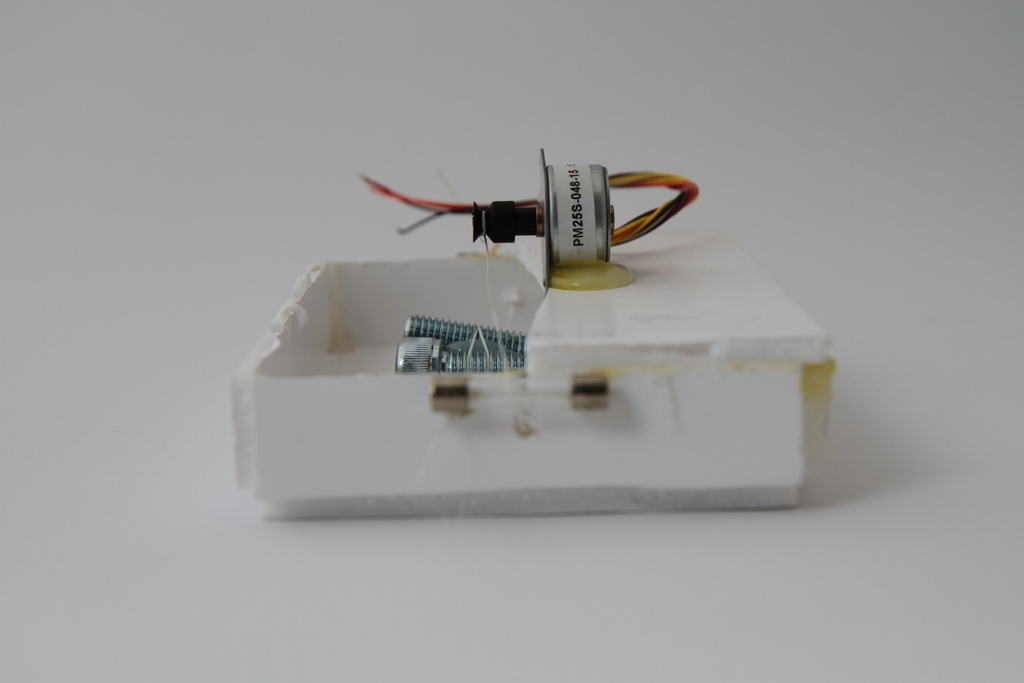
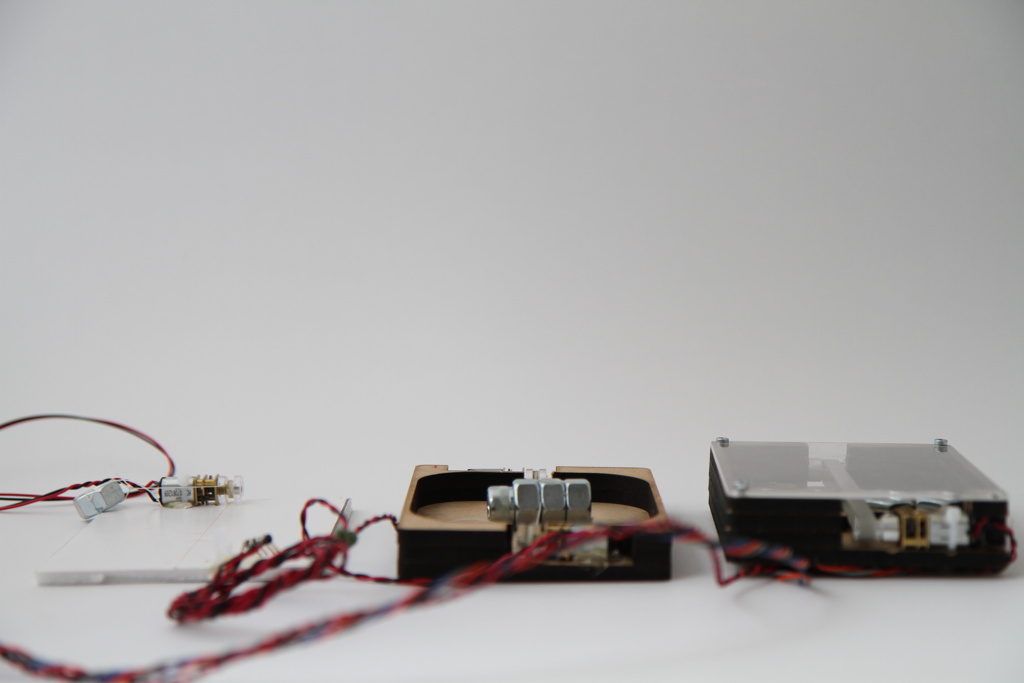
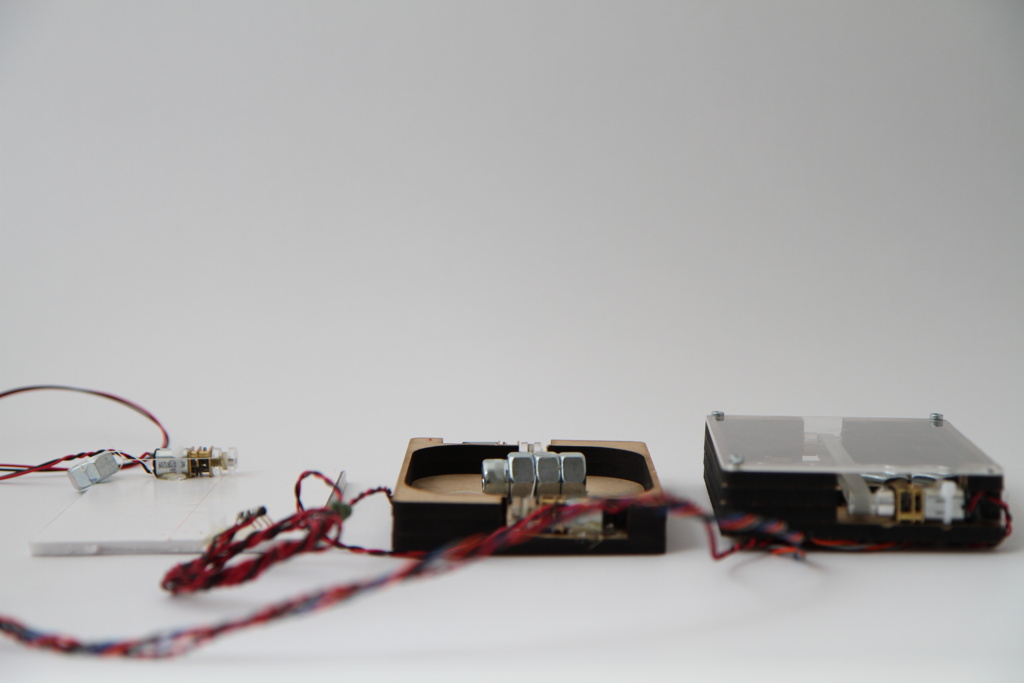
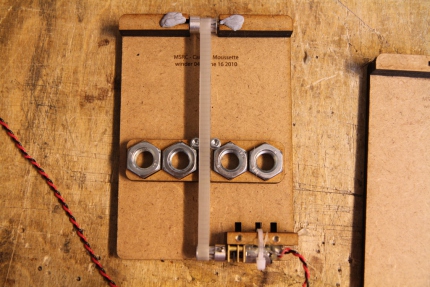
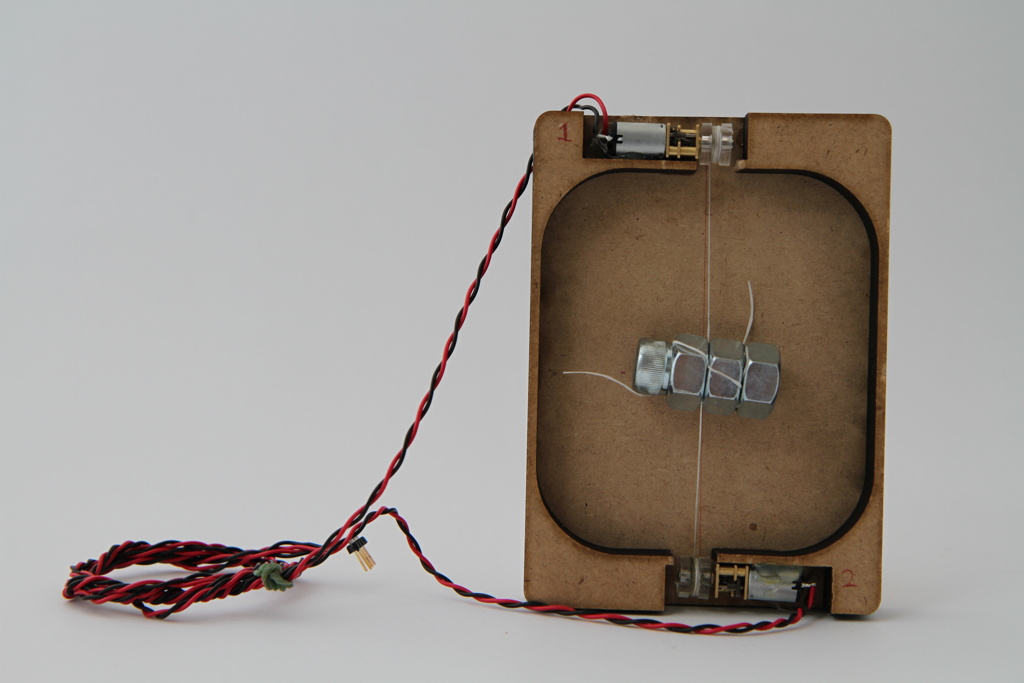
Winder 03
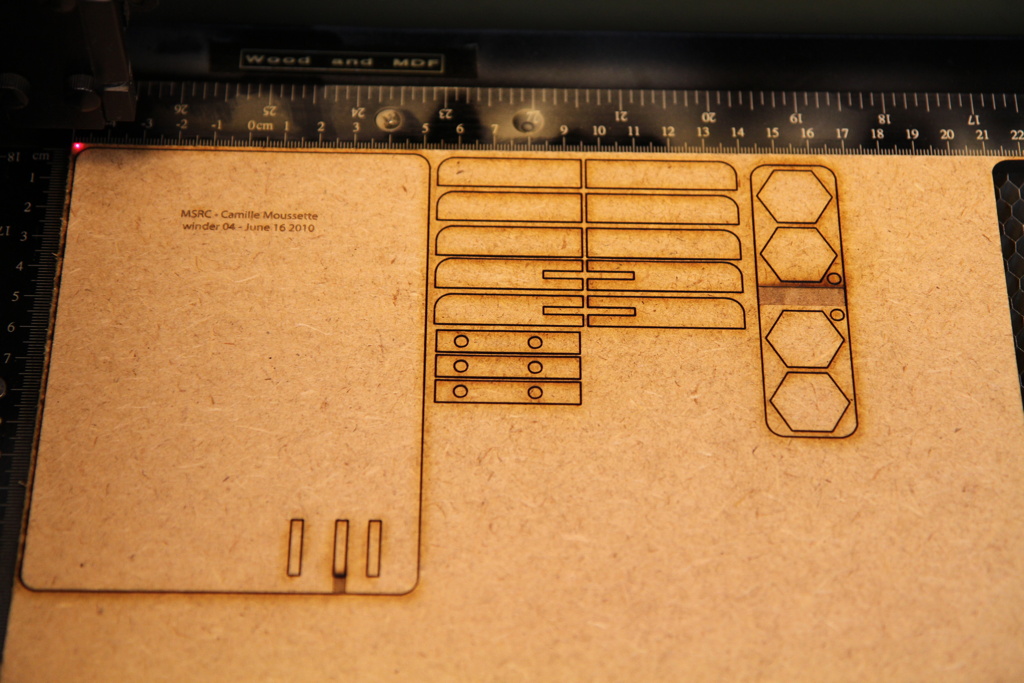
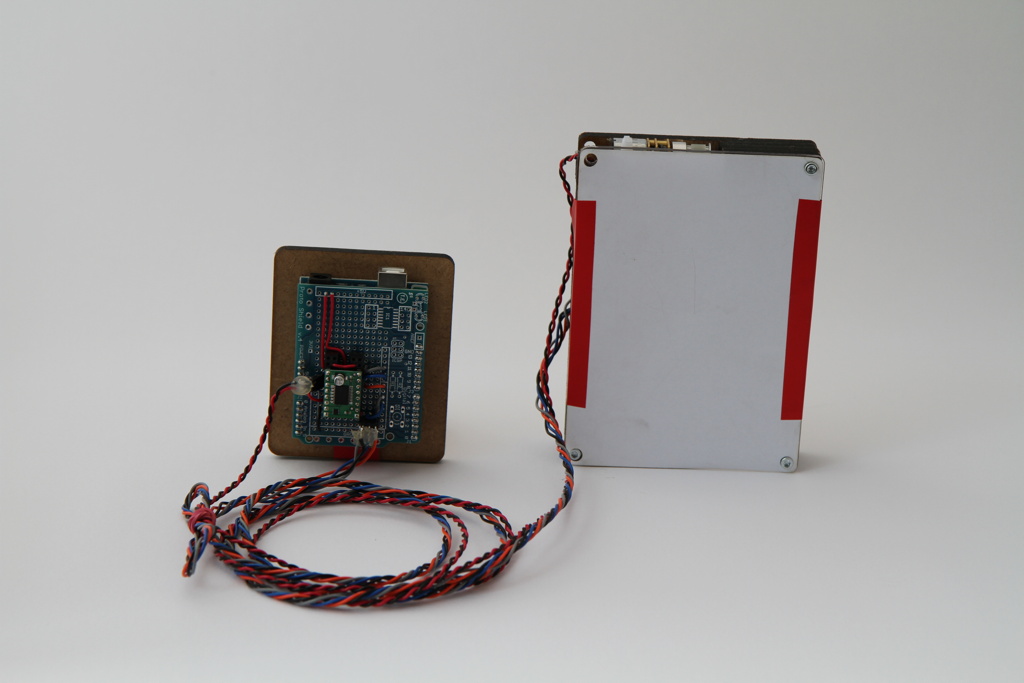
In version 03, I returned to a dual winder setup, but built a stronger base or frame. I can drive the way much faster and with stronger torque. It means I can also move heavier parts.
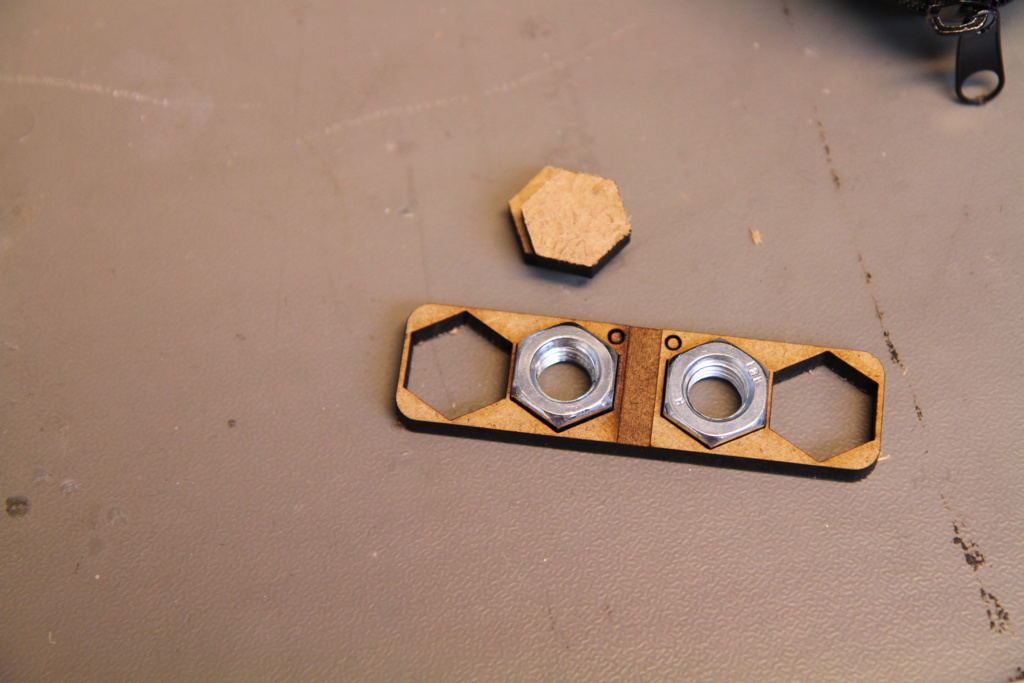
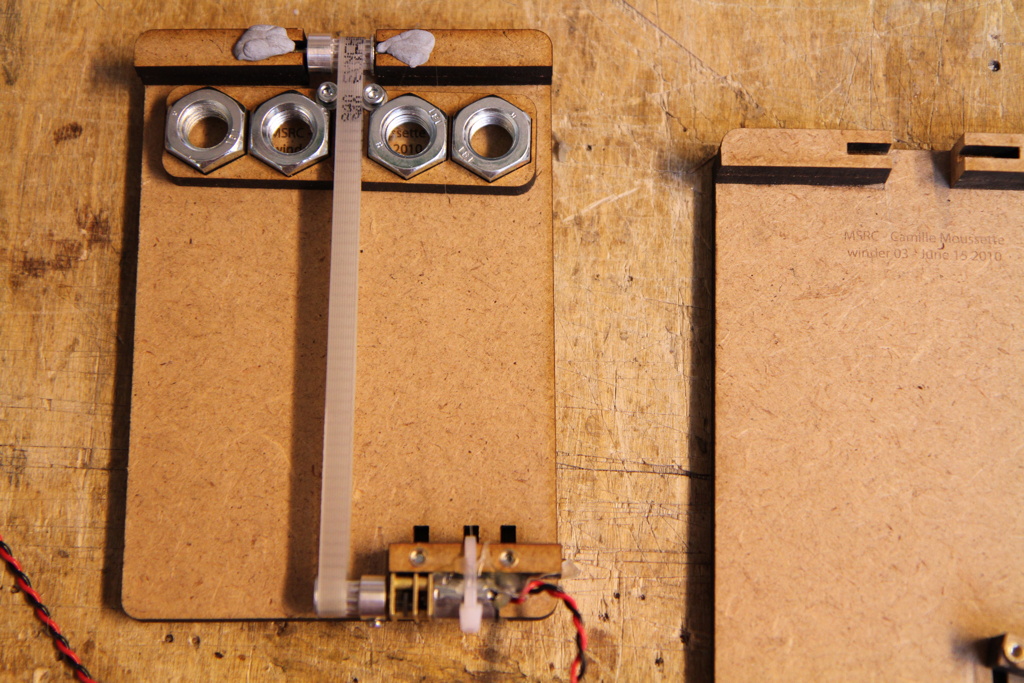
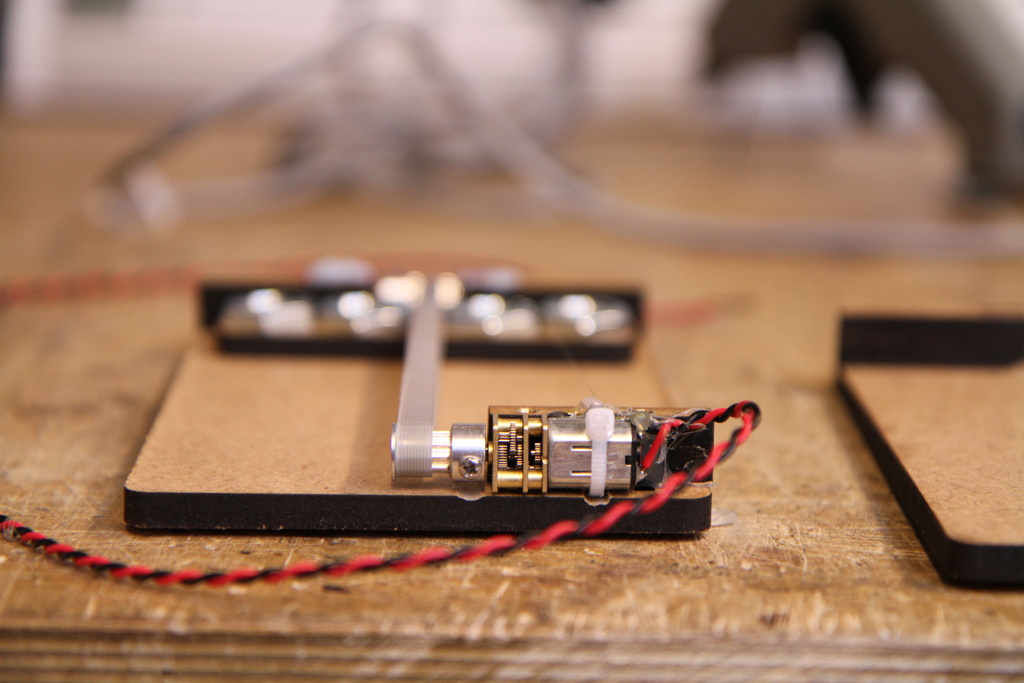
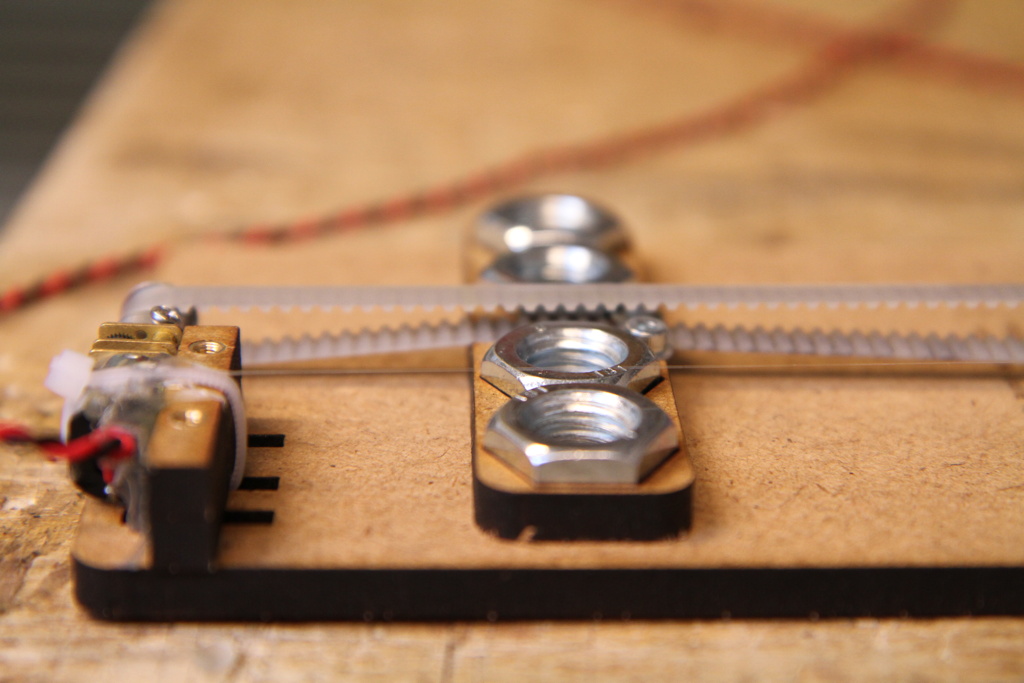
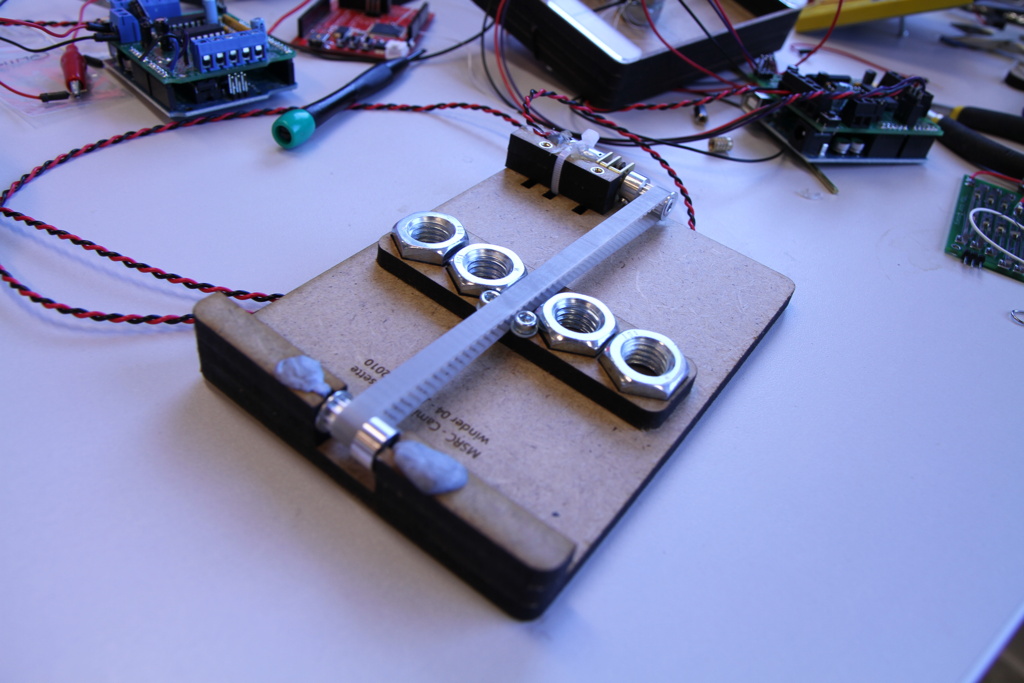
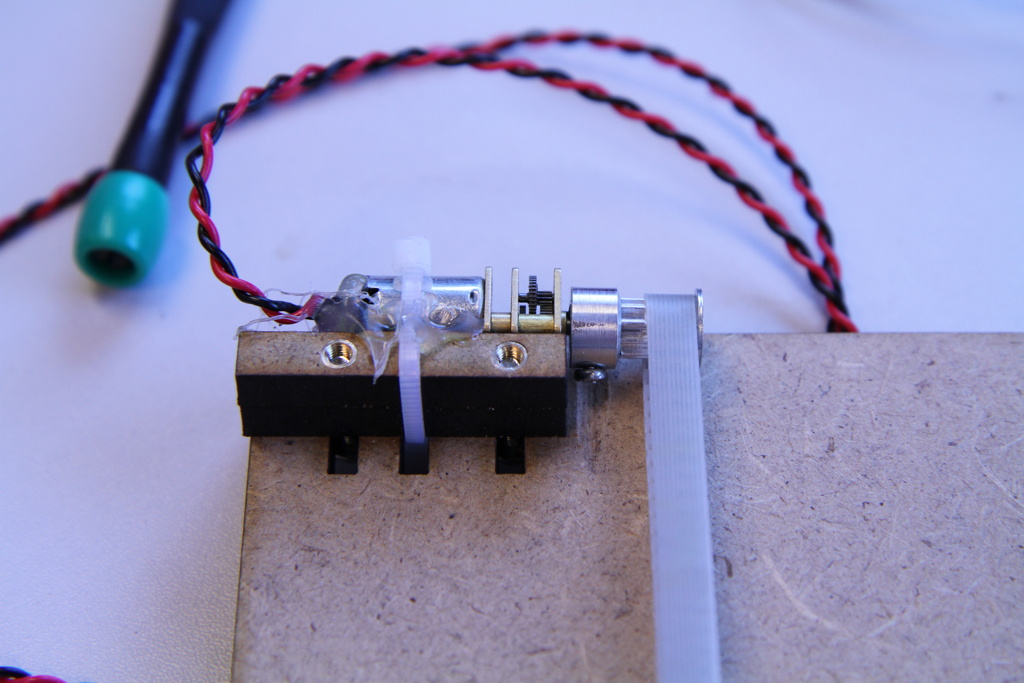
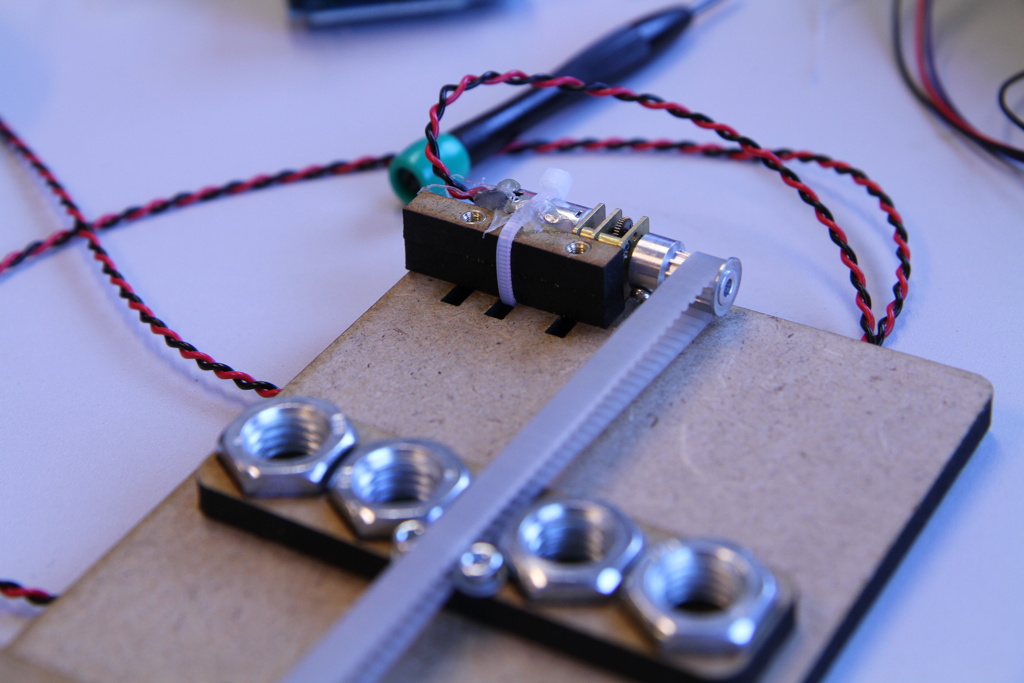
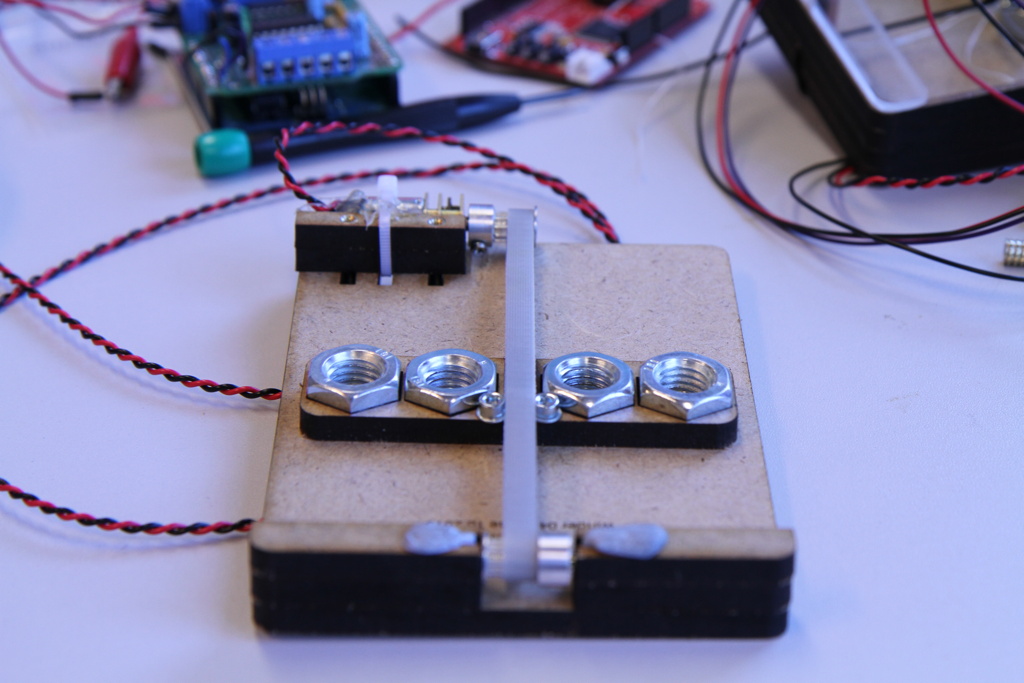
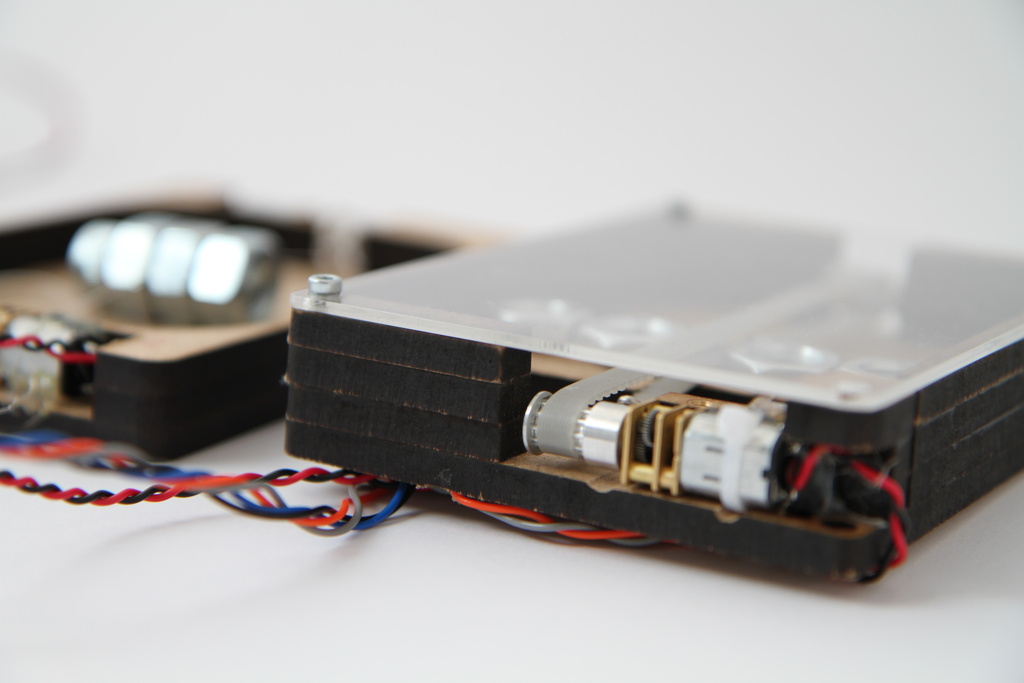
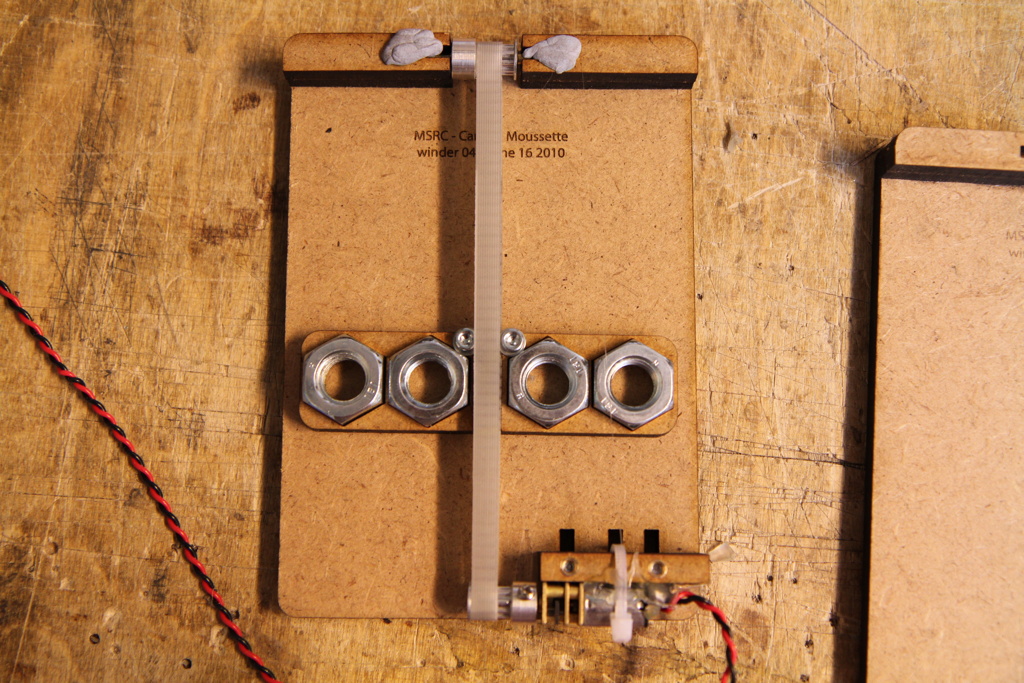
Winder 04
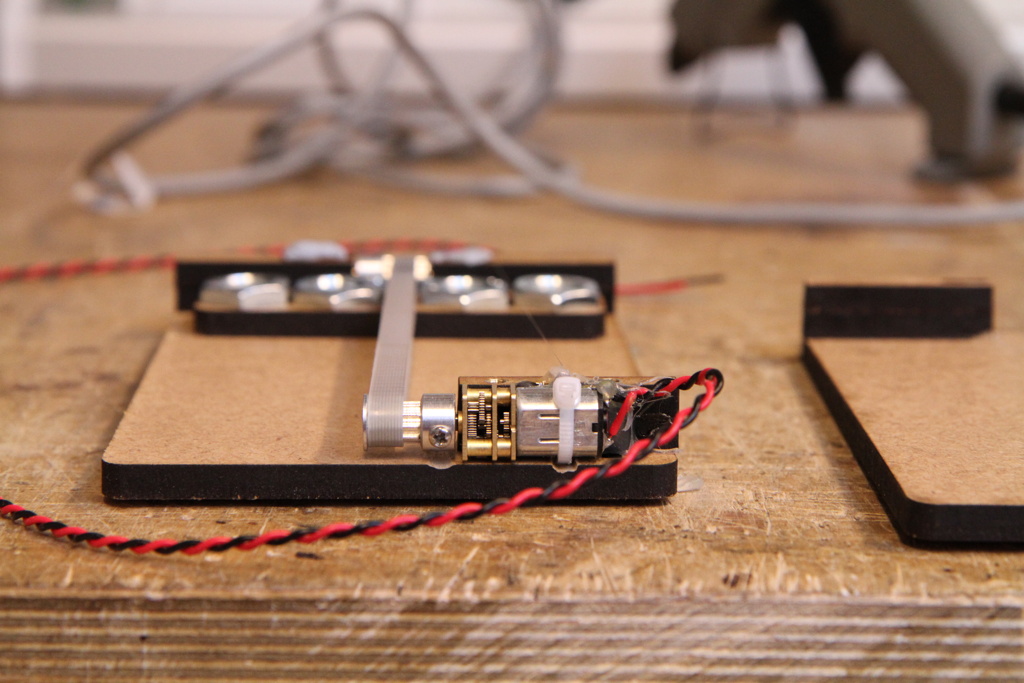
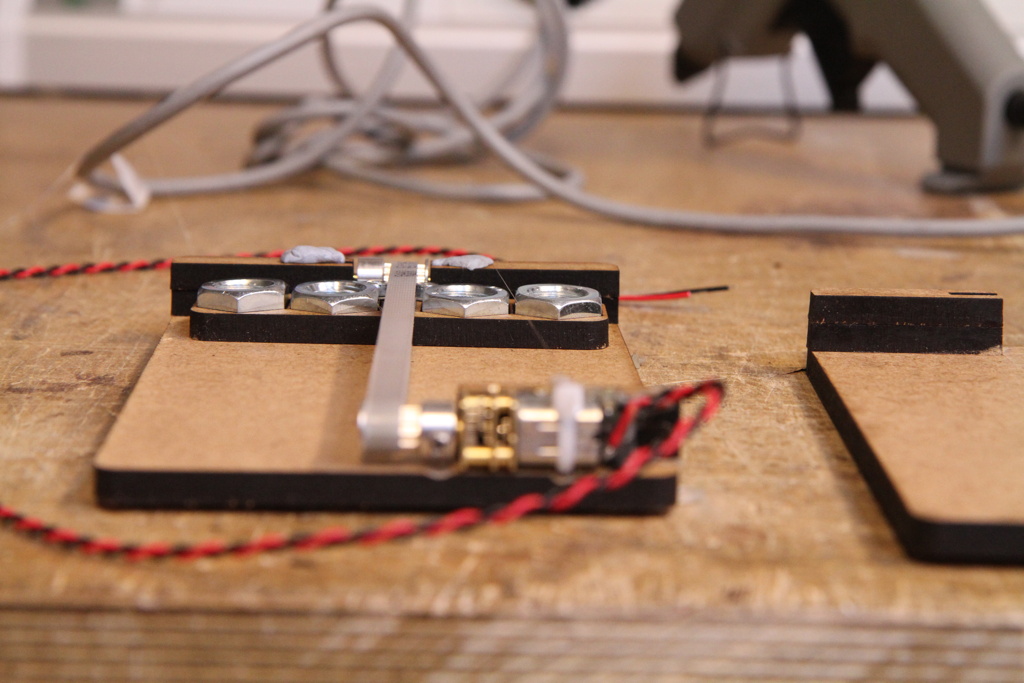
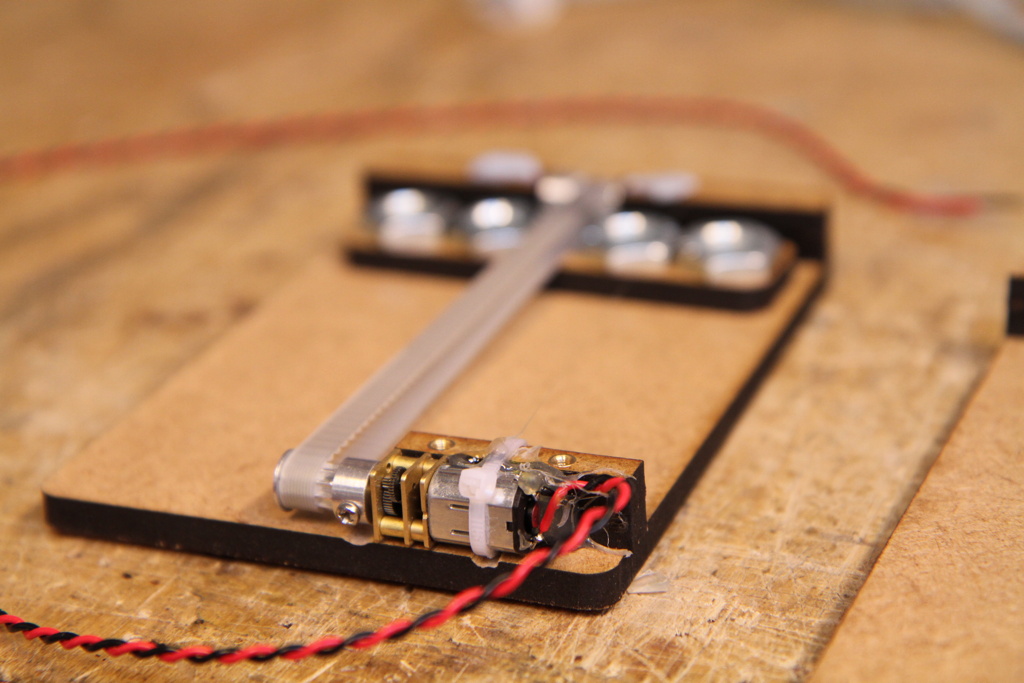
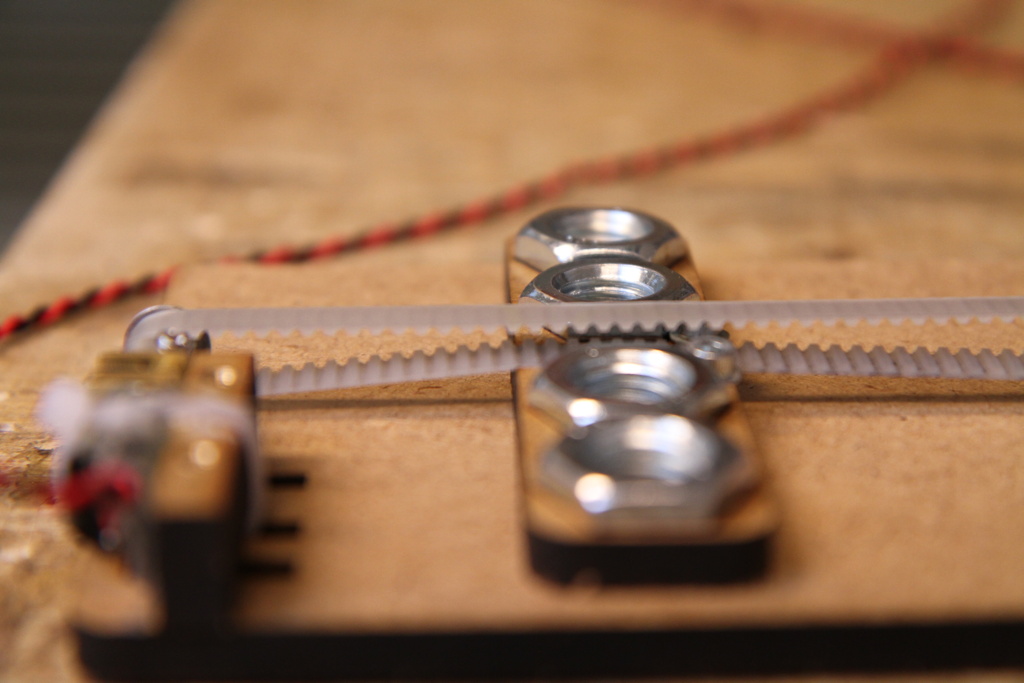
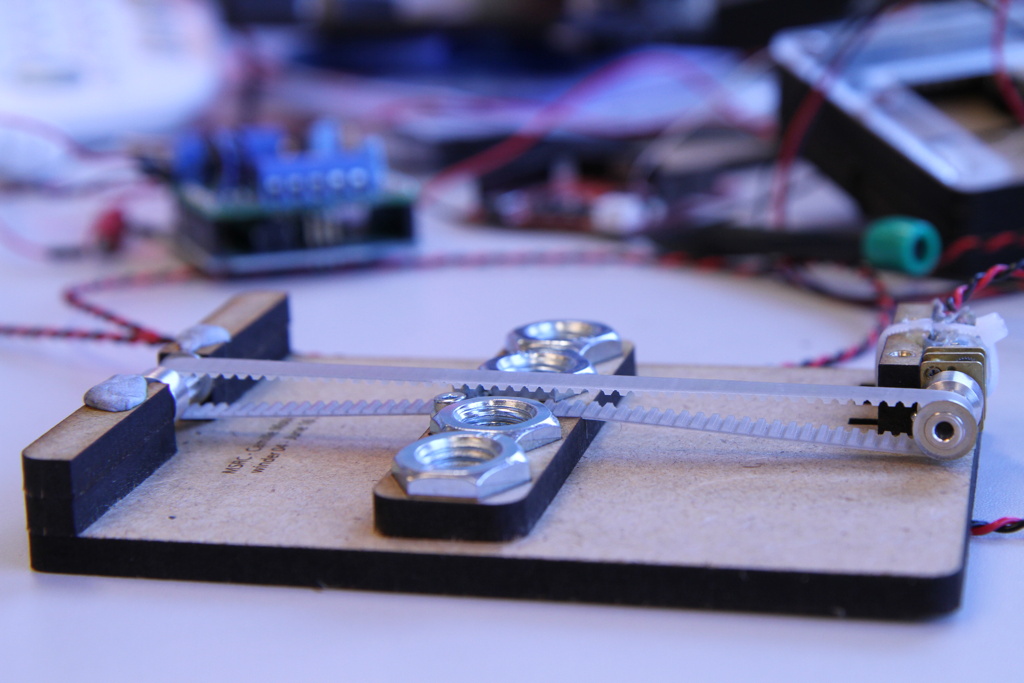
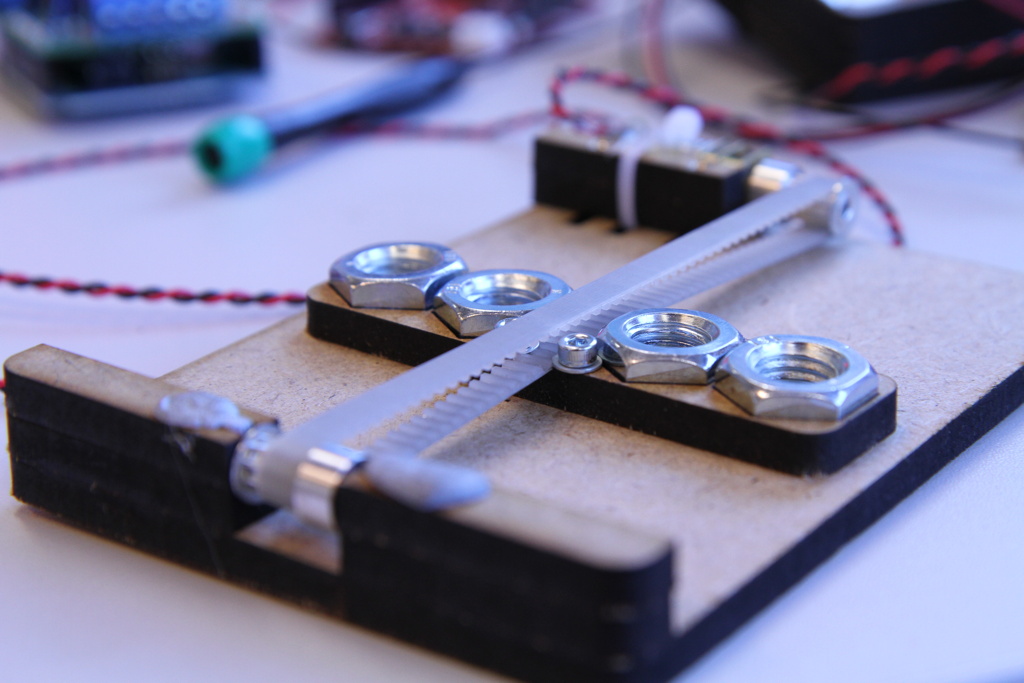
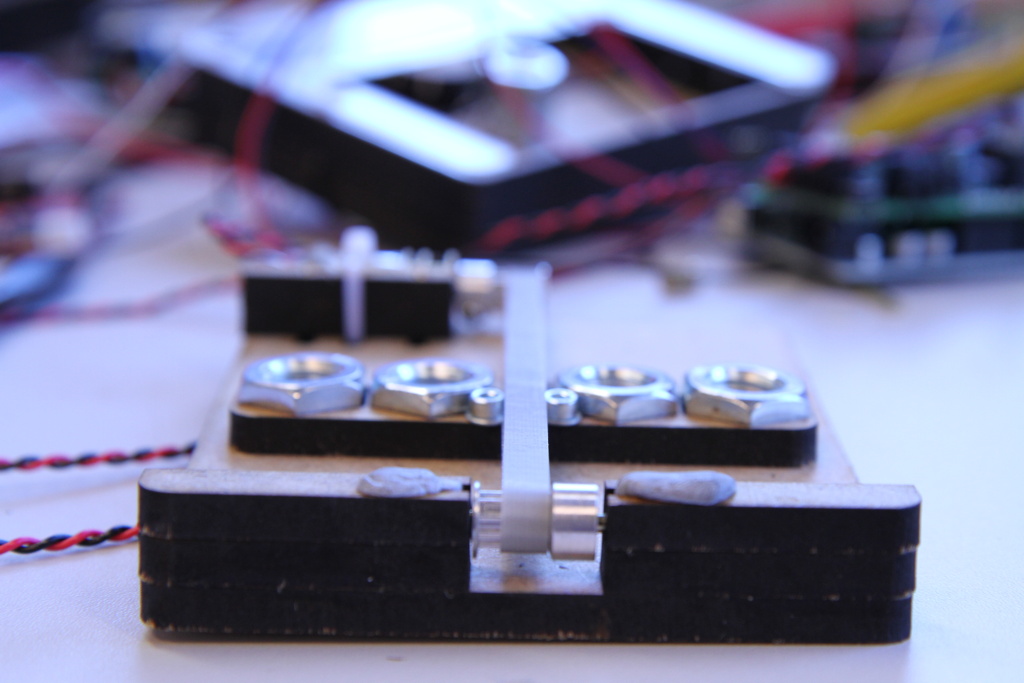
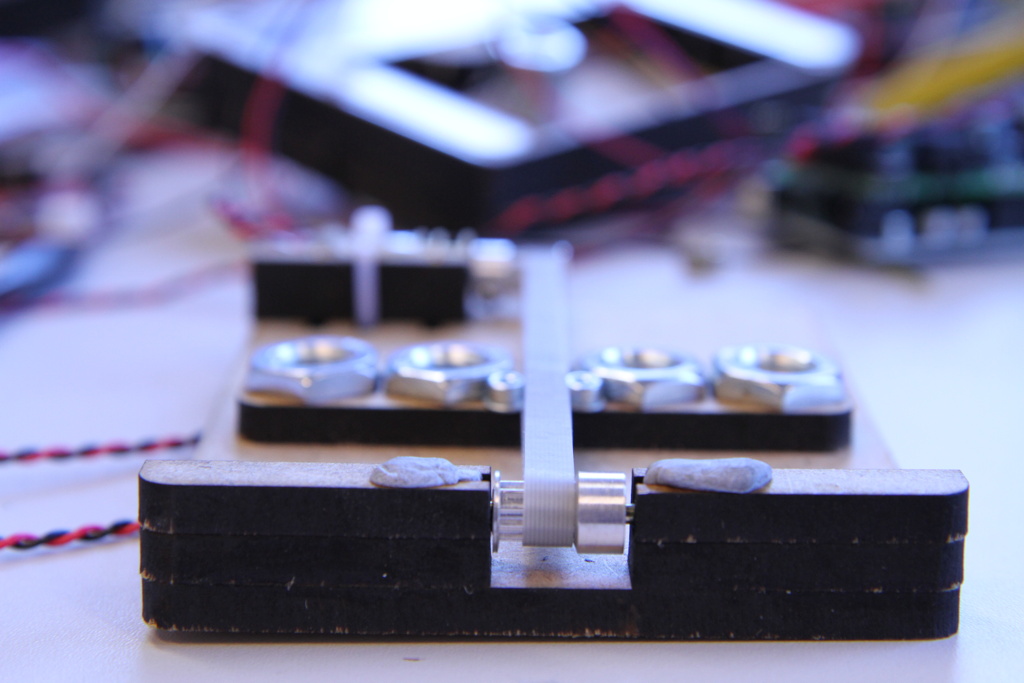
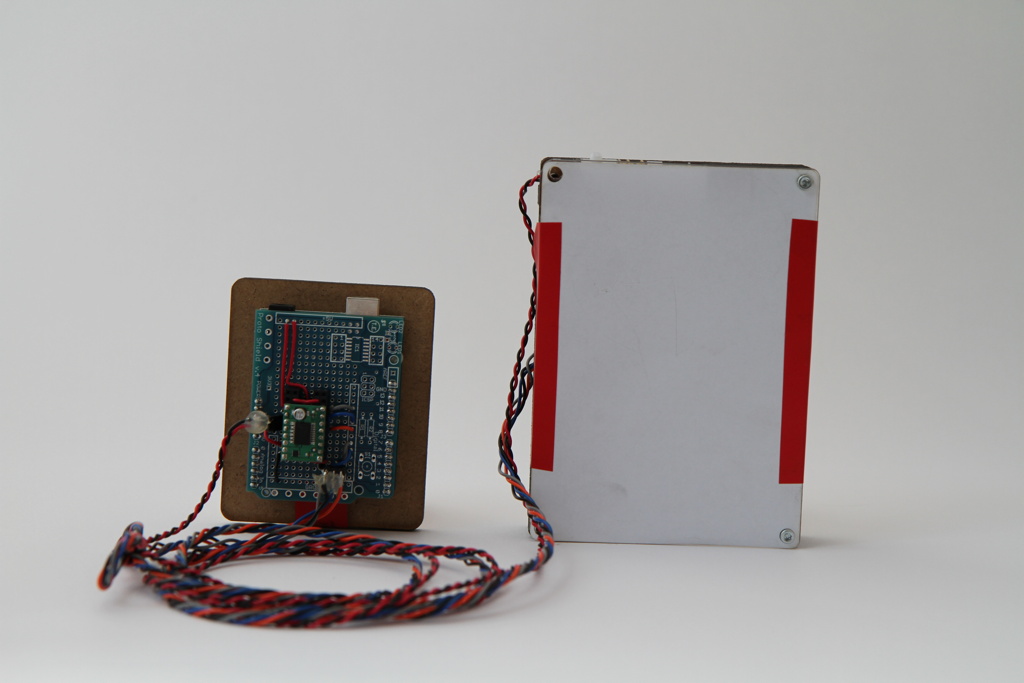
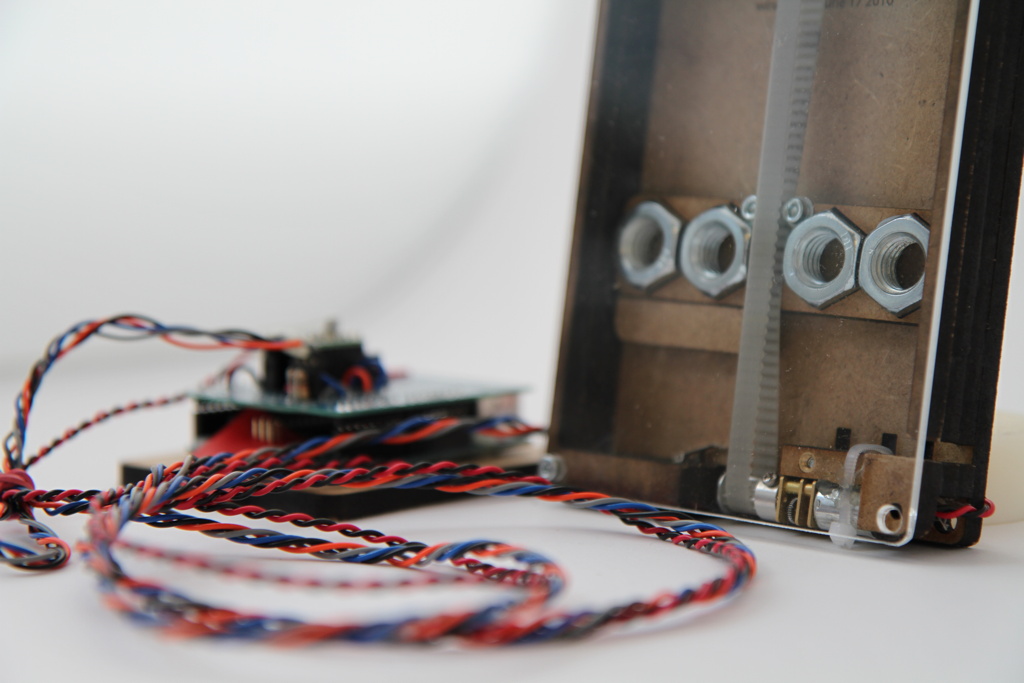
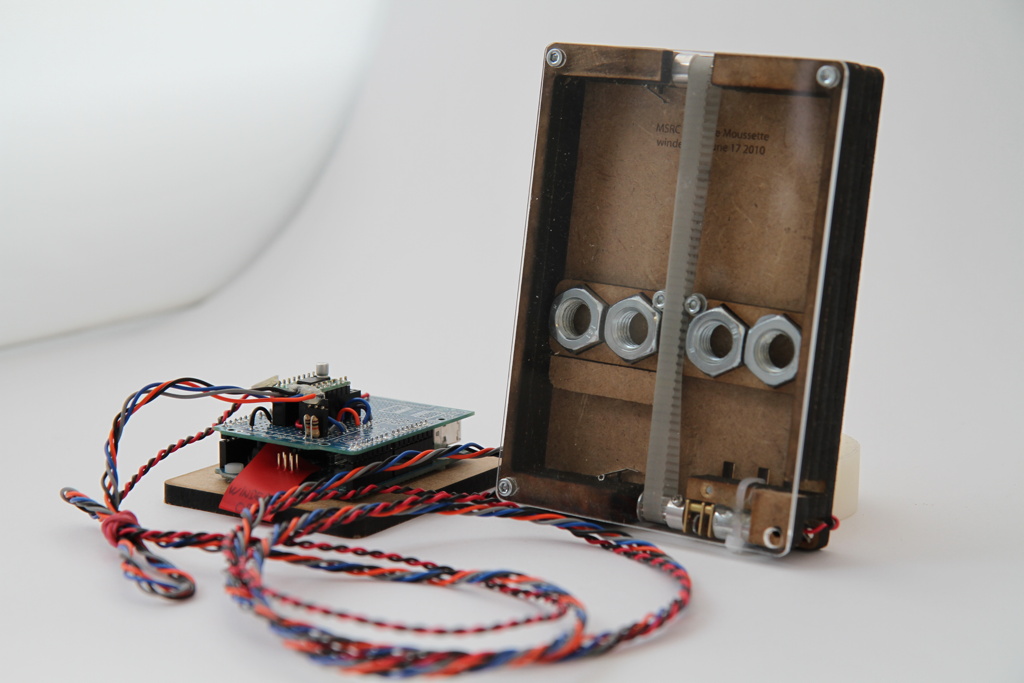
I stopped using the dental floss and opt for a proper belt with geared pulleys. It is much easier to maintain tension and proper grip in this configuration. I still don't have position control at this point.
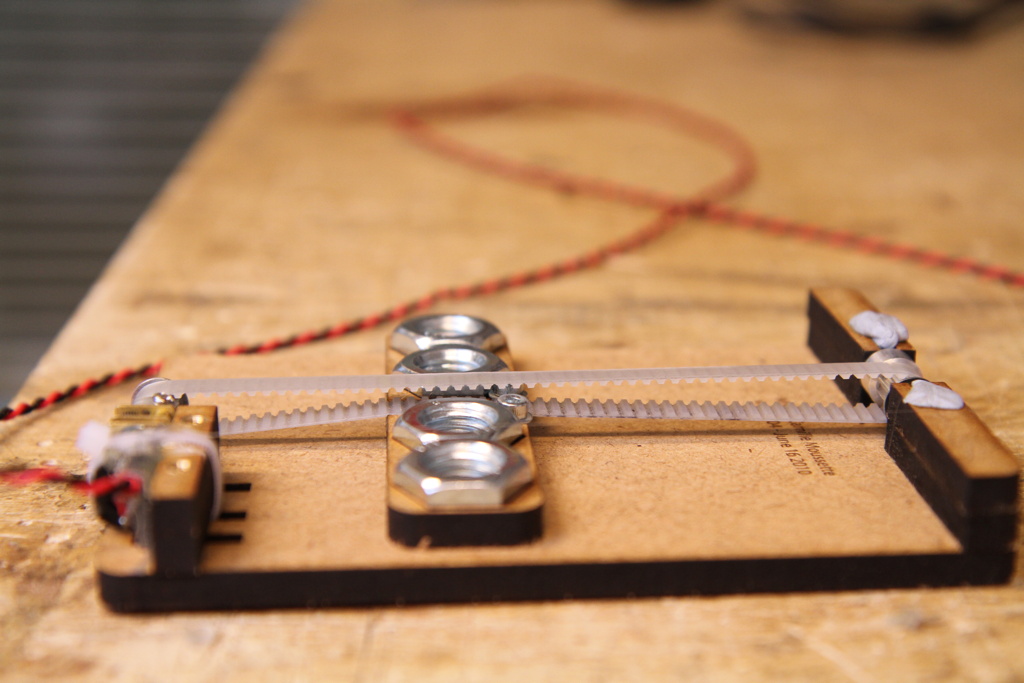
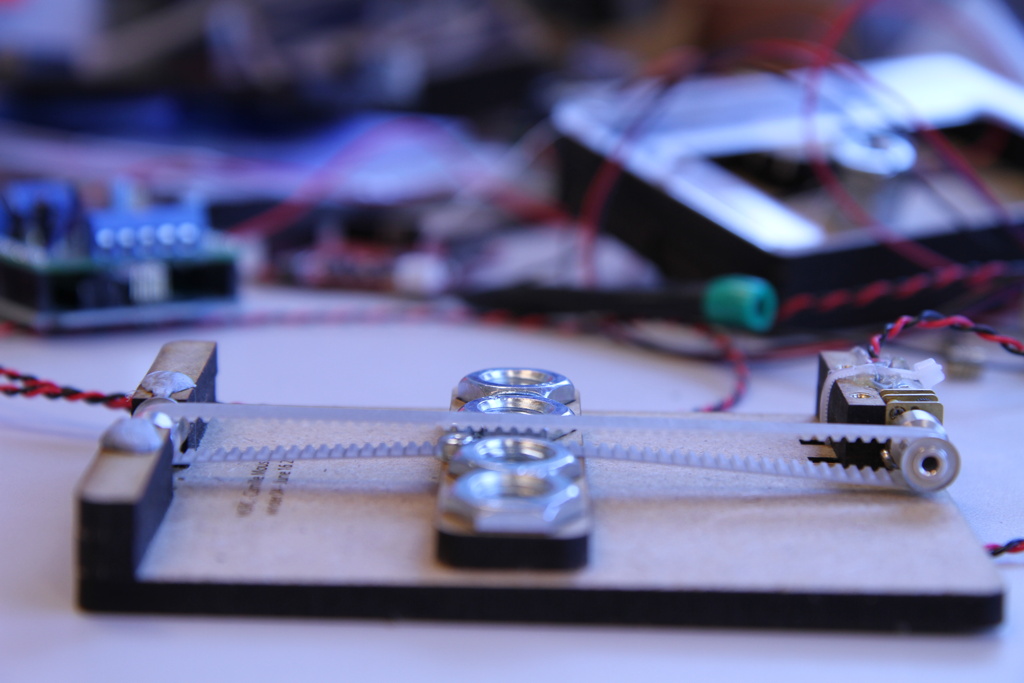
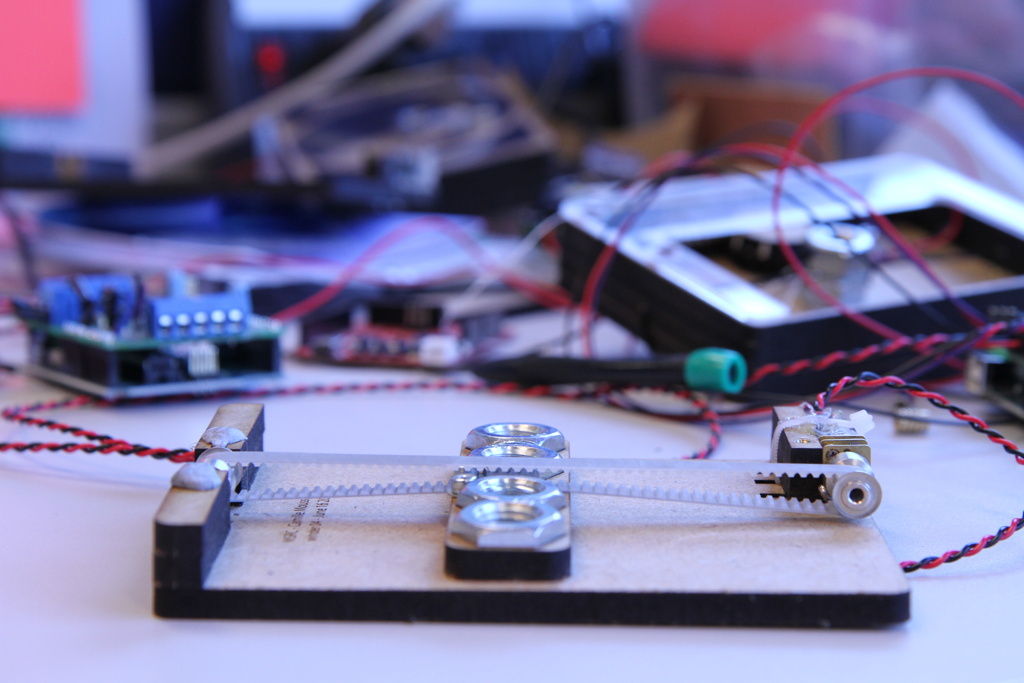
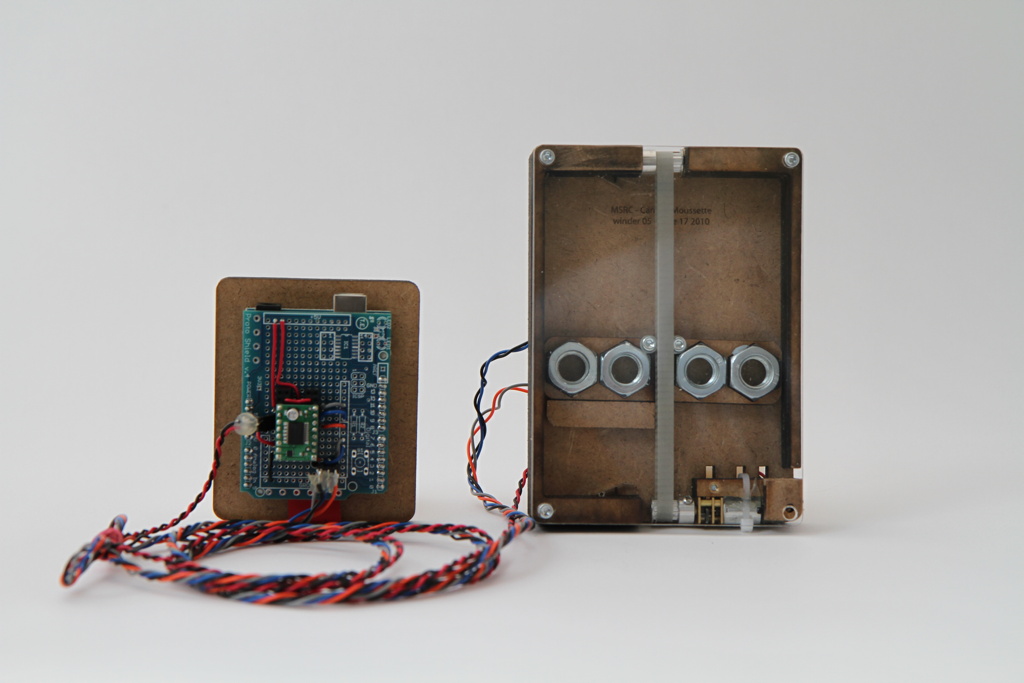
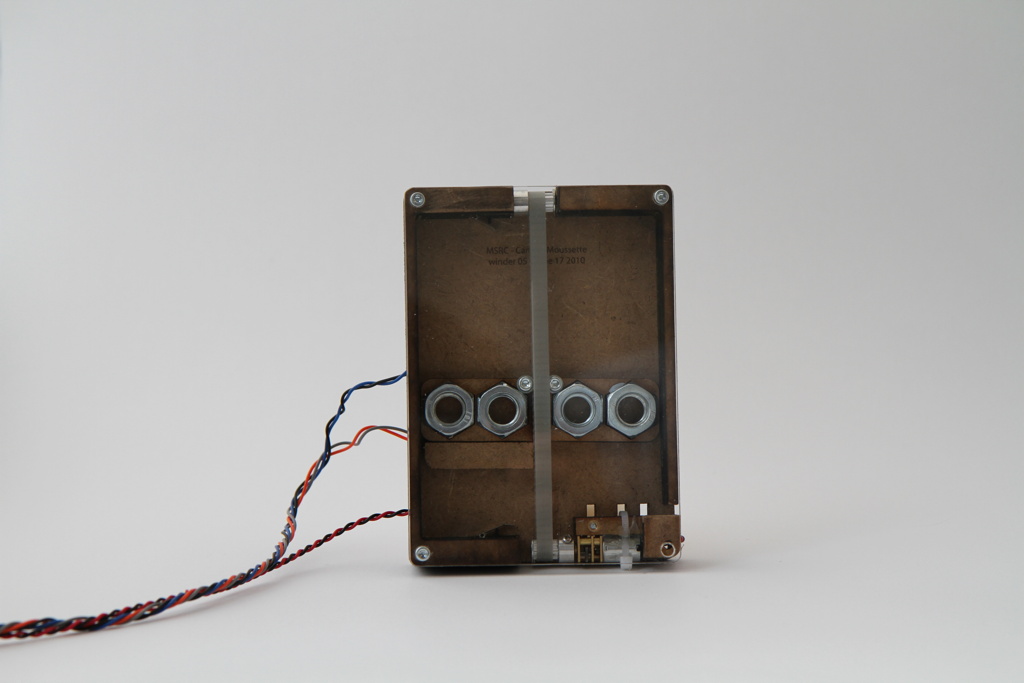
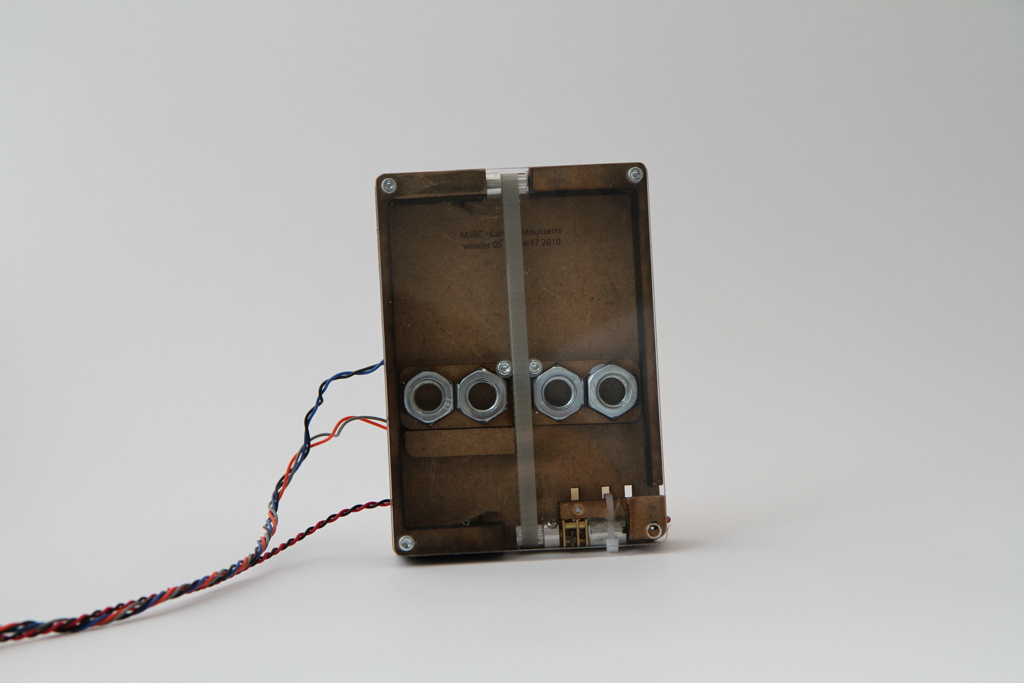
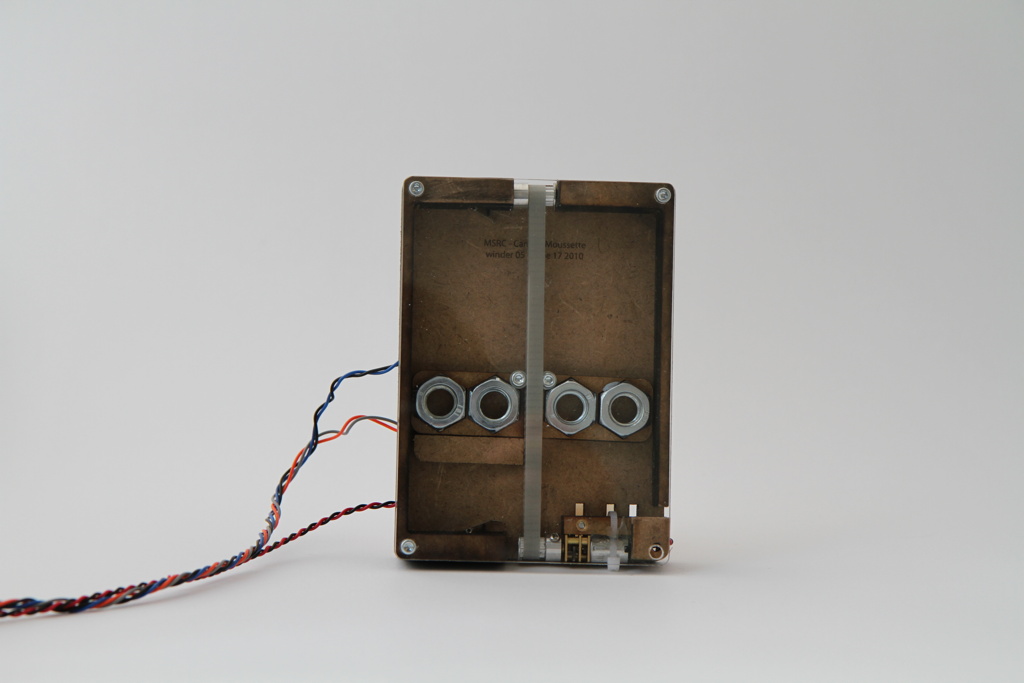
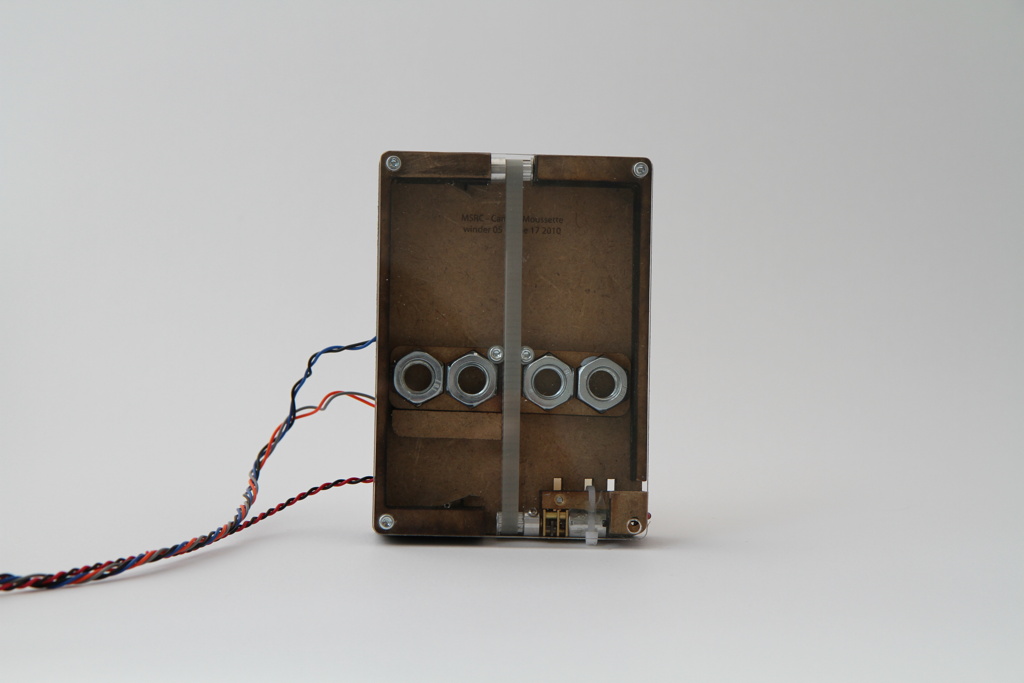
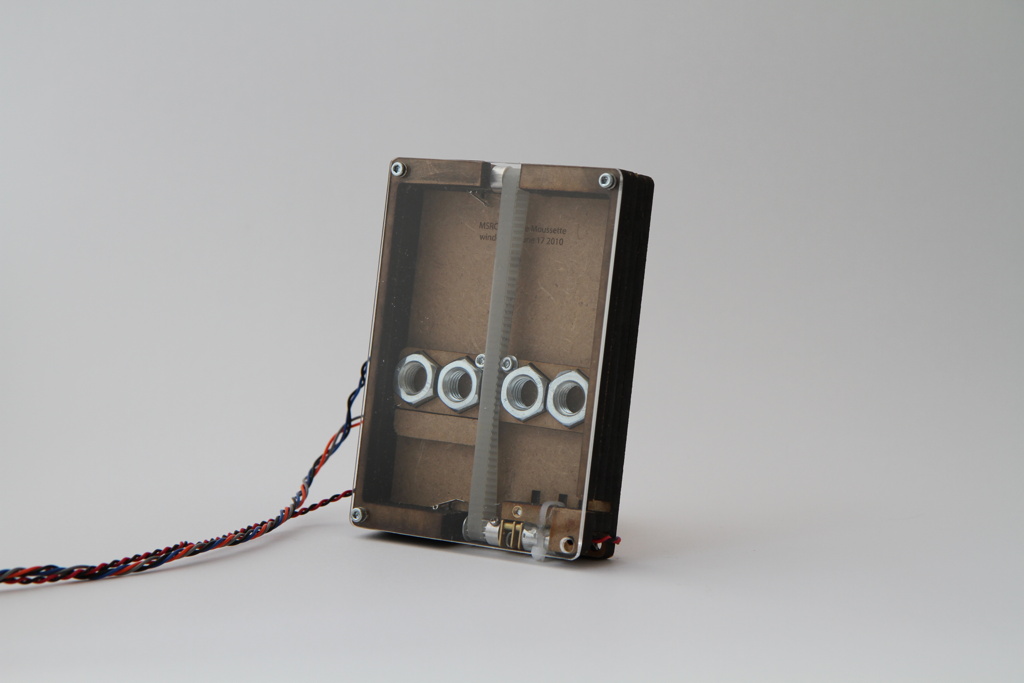
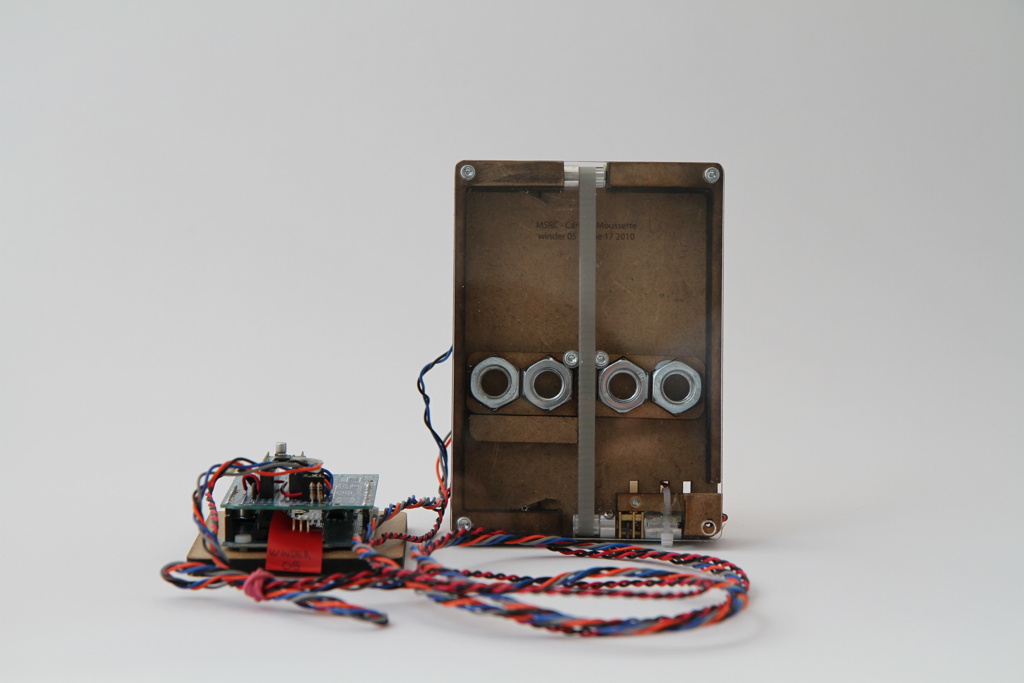
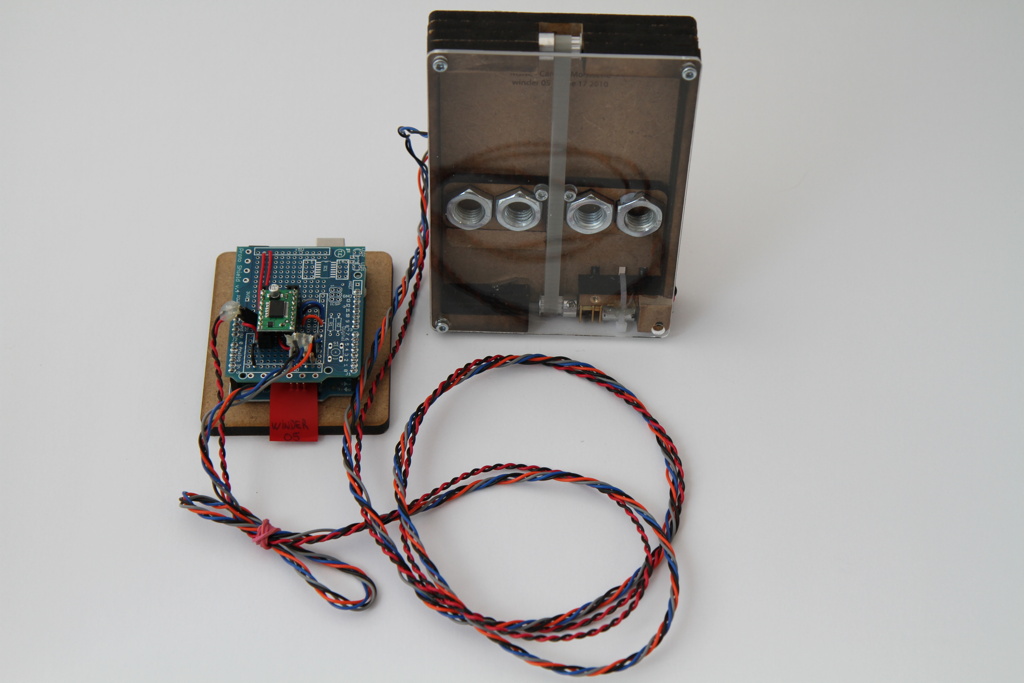
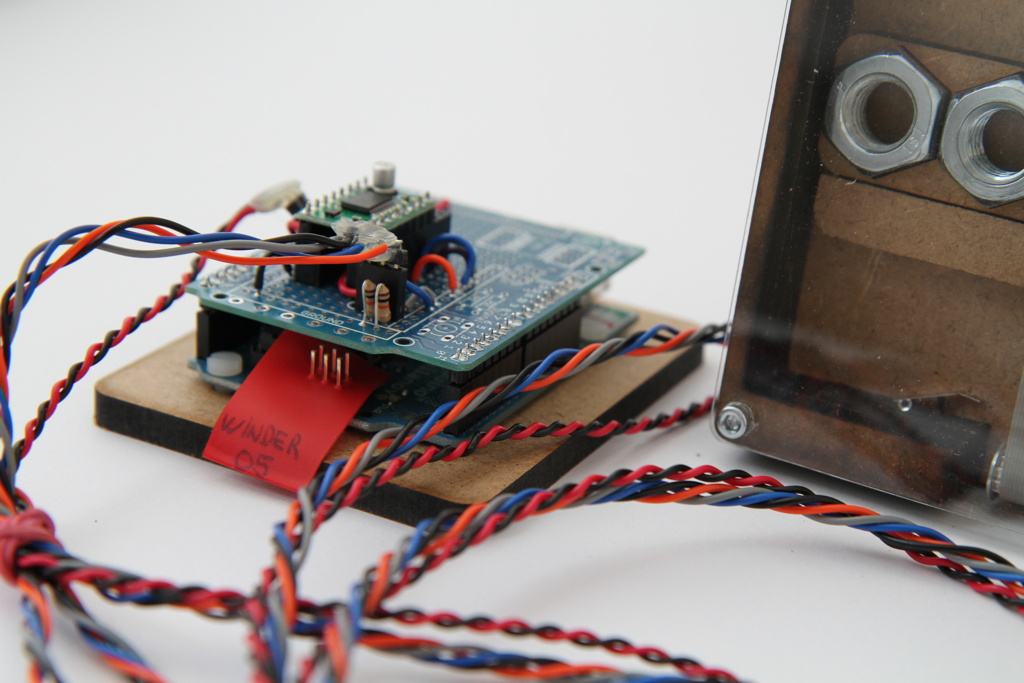
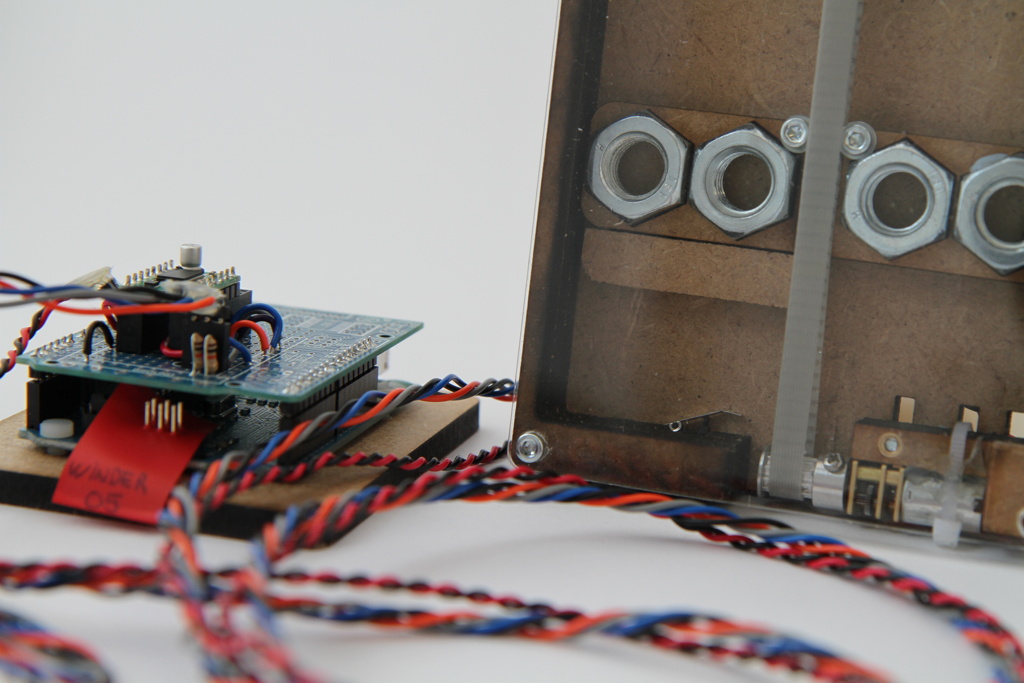
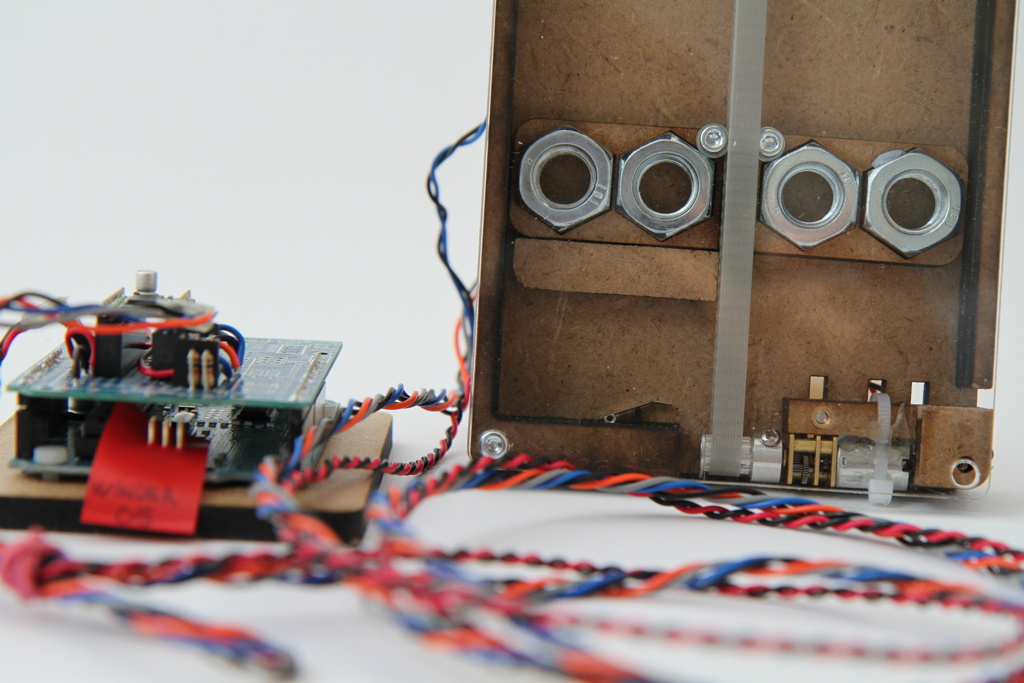
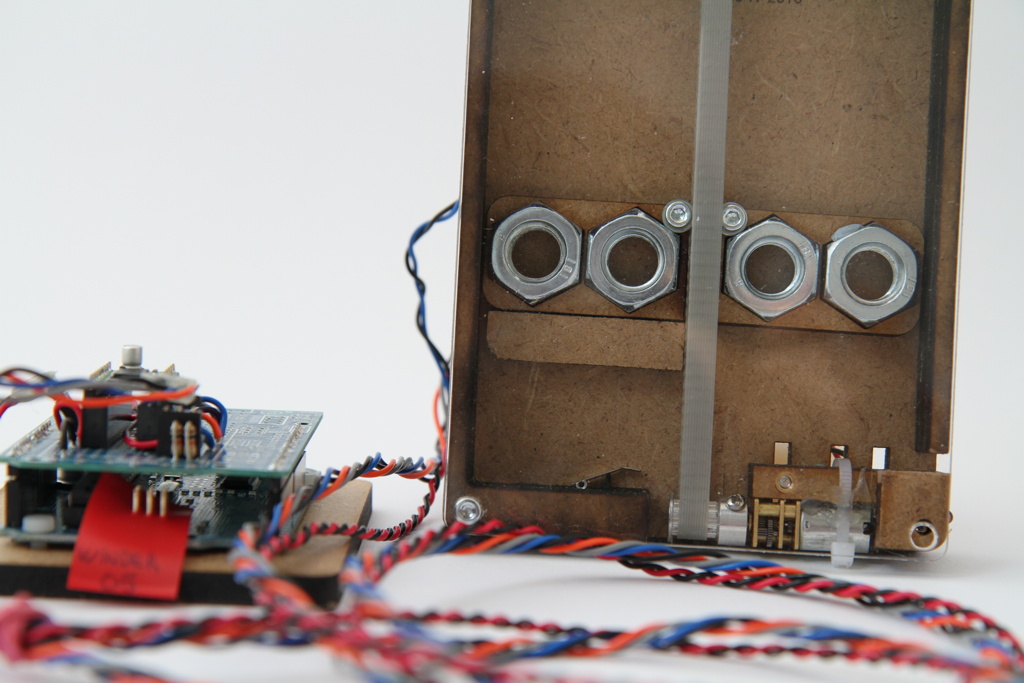
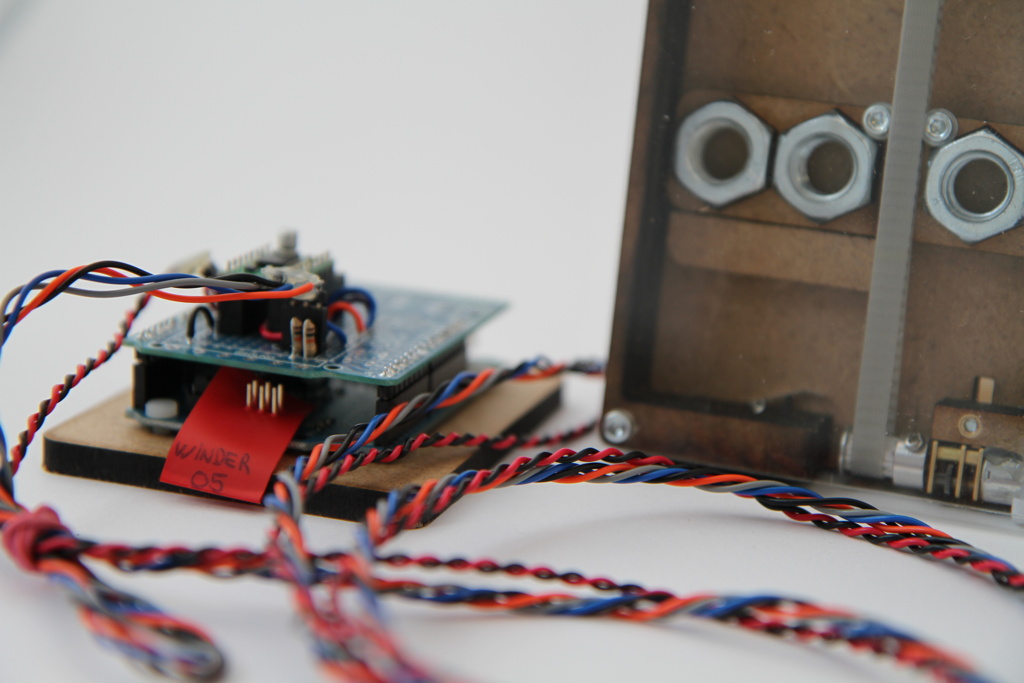
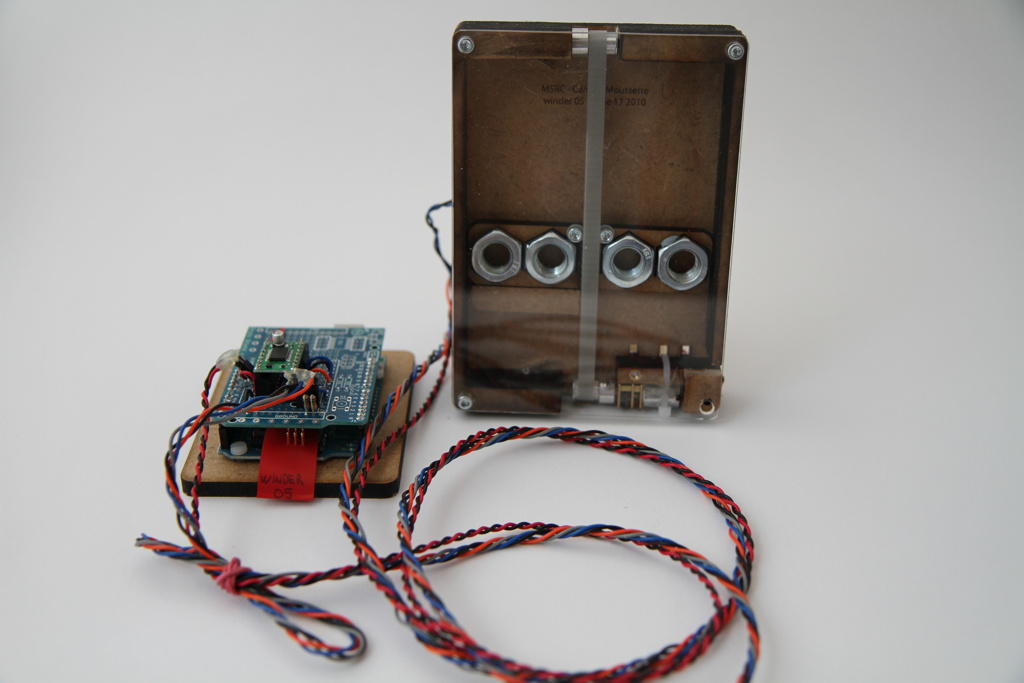
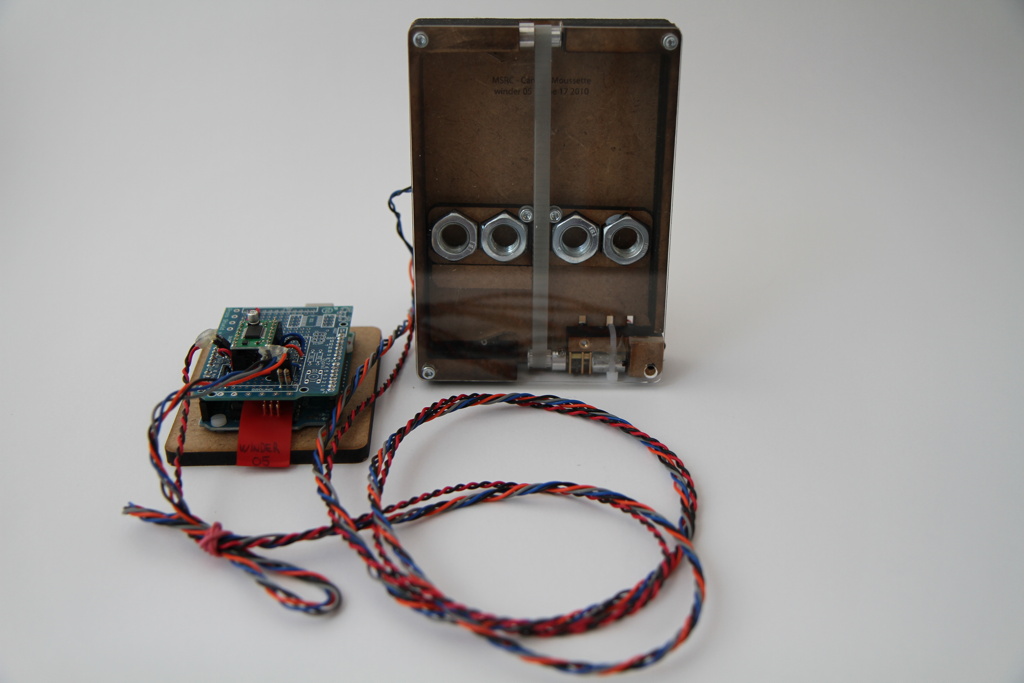
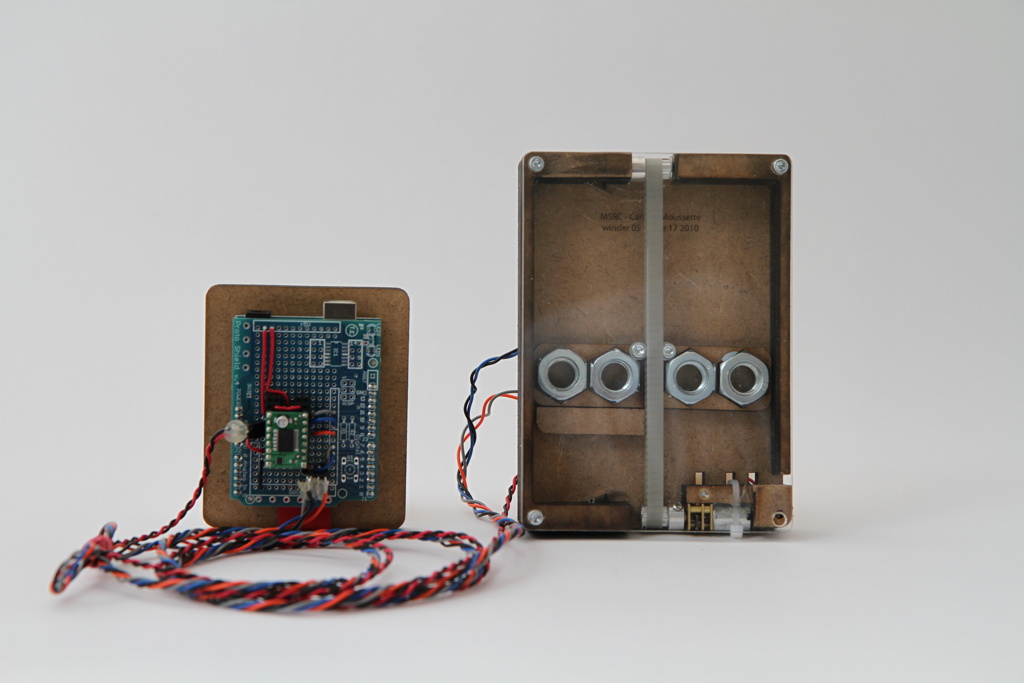
Winder 05 (final)
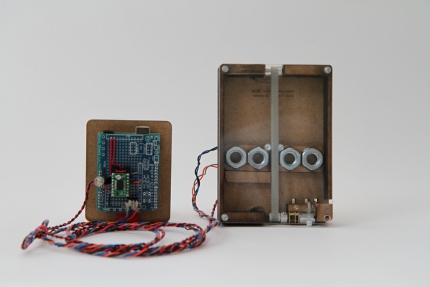
The latest iteration adds some limit switches at both extremities. I can now run a small auto-configure routine and with proper timing have an approximate idea where the carriage is. I also added a cart where it's easy to add or reduce the weight being moved around.
Videos
Move the center of mass of a handheld device along one axis.
In this first iteration, I'm using two motors to wind up/down the weight. By using this setup I can also build some tension in the lines, or release both of them to let the weight go.
Winder 02
In this configuration, I'm trying to use only one motor, with the line wrapped around a pulley. The grip was very weak, so most of the time, the motor was spinning freely.
Winder 03
In version 03, I returned to a dual winder setup, but built a stronger base or frame. I can drive the way much faster and with stronger torque. It means I can also move heavier parts.
Winder 04
I stopped using the dental floss and opt for a proper belt with geared pulleys. It is much easier to maintain tension and proper grip in this configuration. I still don't have position control at this point.
Winder 05 (final)
The latest iteration adds some limit switches at both extremities. I can now run a small auto-configure routine and with proper timing have an approximate idea where the carriage is. I also added a cart where it's easy to add or reduce the weight being moved around.
Videos
In this configuration, I'm trying to use only one motor, with the line wrapped around a pulley. The grip was very weak, so most of the time, the motor was spinning freely.
In version 03, I returned to a dual winder setup, but built a stronger base or frame. I can drive the way much faster and with stronger torque. It means I can also move heavier parts.
Winder 04
I stopped using the dental floss and opt for a proper belt with geared pulleys. It is much easier to maintain tension and proper grip in this configuration. I still don't have position control at this point.
Winder 05 (final)
The latest iteration adds some limit switches at both extremities. I can now run a small auto-configure routine and with proper timing have an approximate idea where the carriage is. I also added a cart where it's easy to add or reduce the weight being moved around.
Videos
I stopped using the dental floss and opt for a proper belt with geared pulleys. It is much easier to maintain tension and proper grip in this configuration. I still don't have position control at this point.
The latest iteration adds some limit switches at both extremities. I can now run a small auto-configure routine and with proper timing have an approximate idea where the carriage is. I also added a cart where it's easy to add or reduce the weight being moved around.
Videos
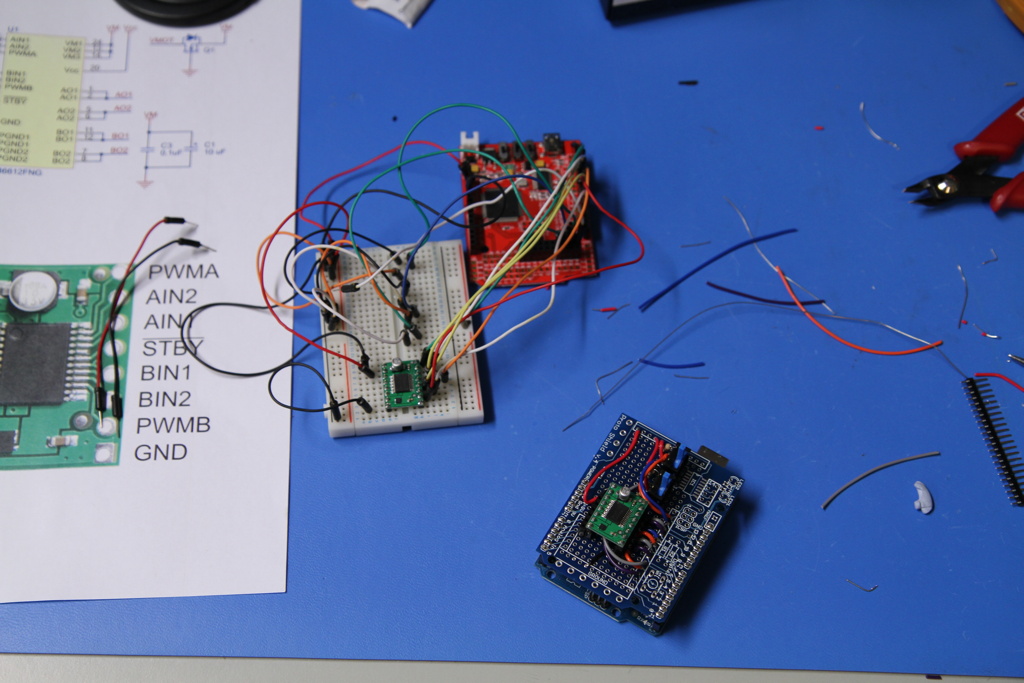
Related photos