2.2 Sketching Haptic Interactions
Concept


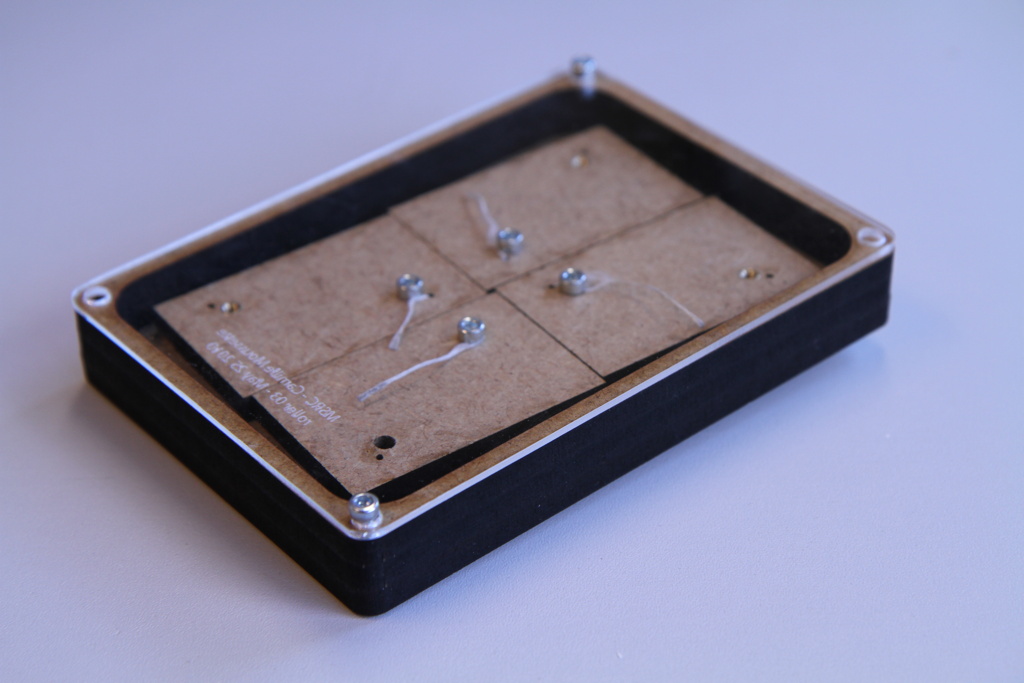
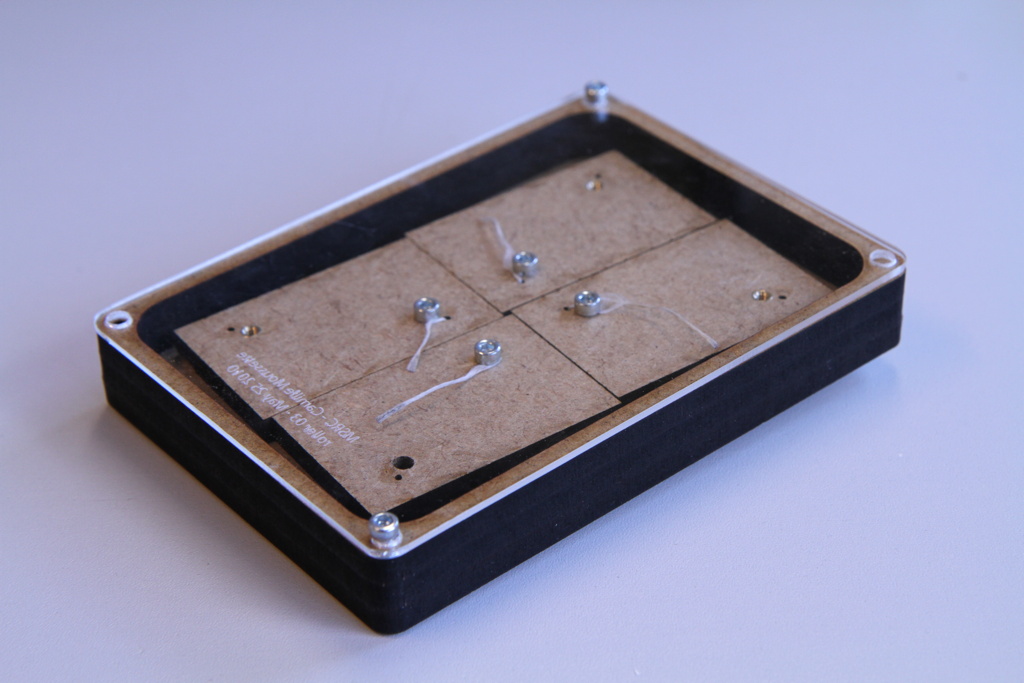
The initial concept for this module comes for this type of toy, where posture/structure can be relaxed. I found it valuable to explore what if a device can loose its structural and mechanical qualities?
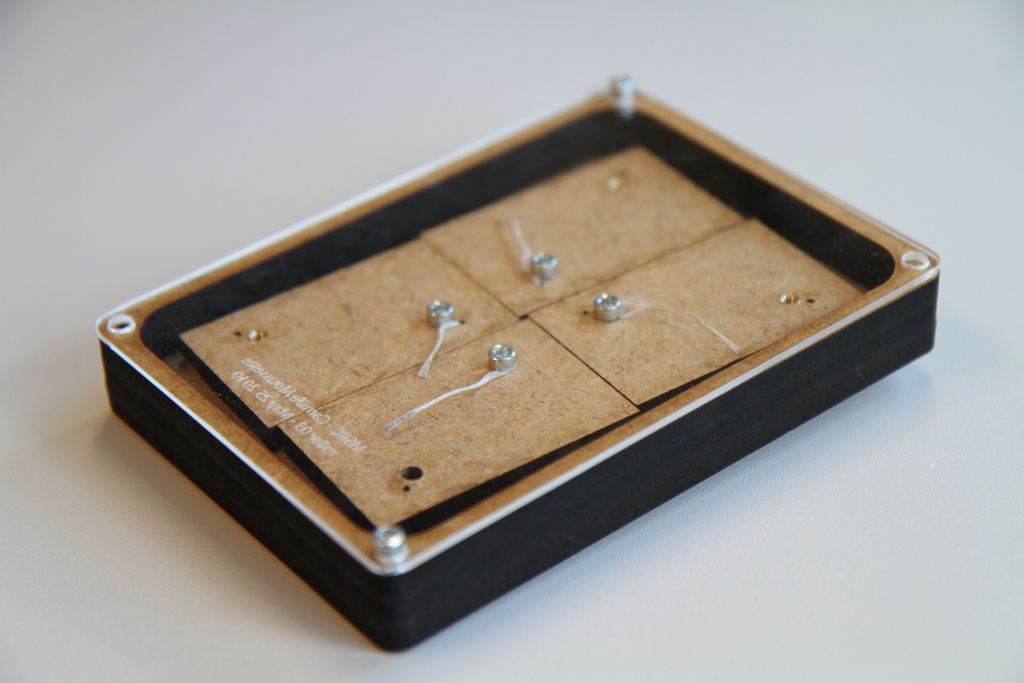
Slacker 01

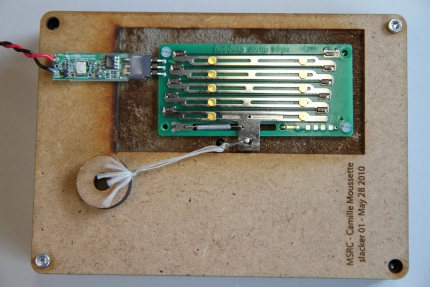
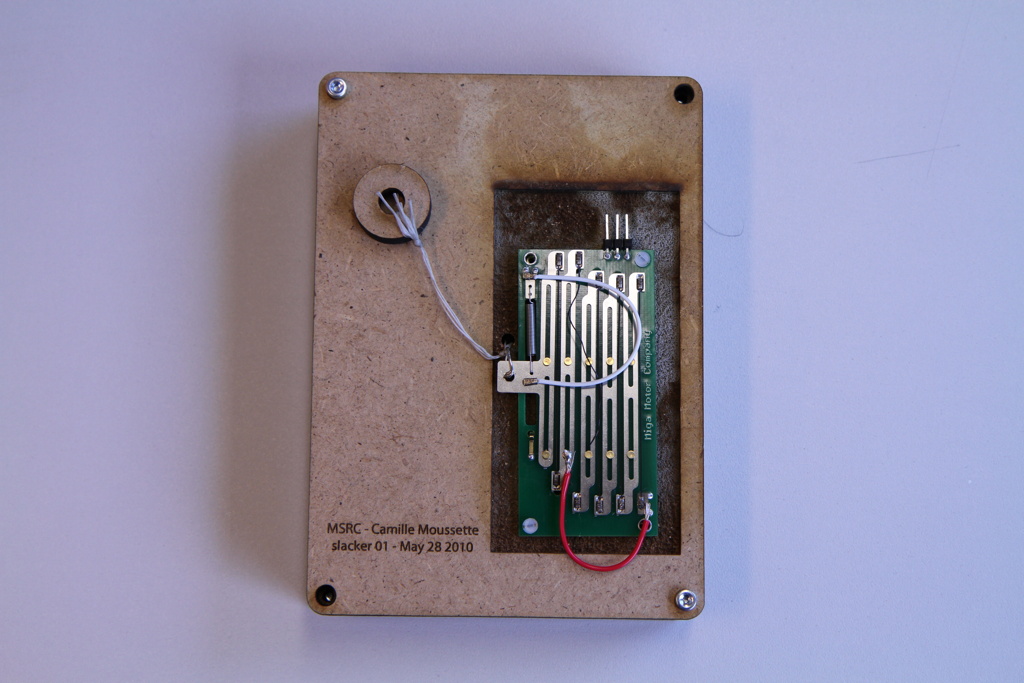
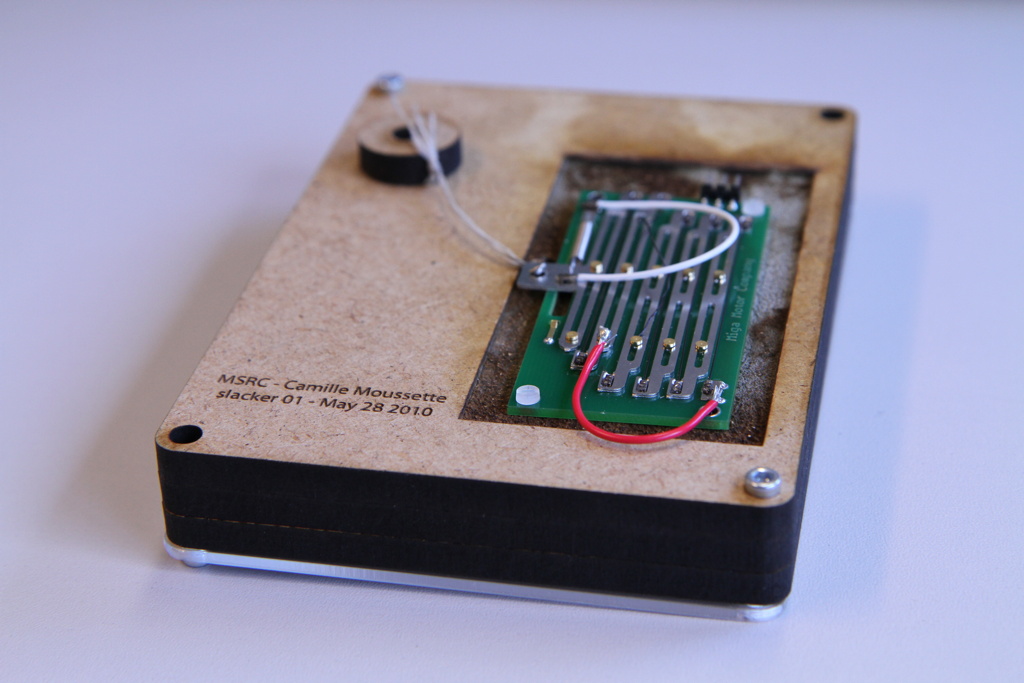
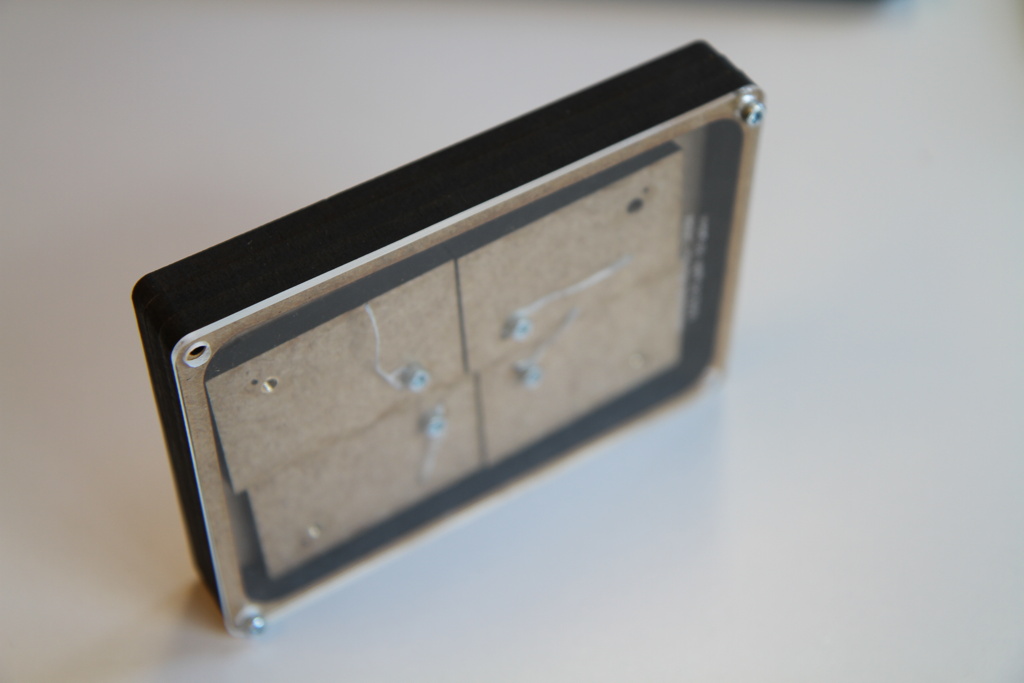
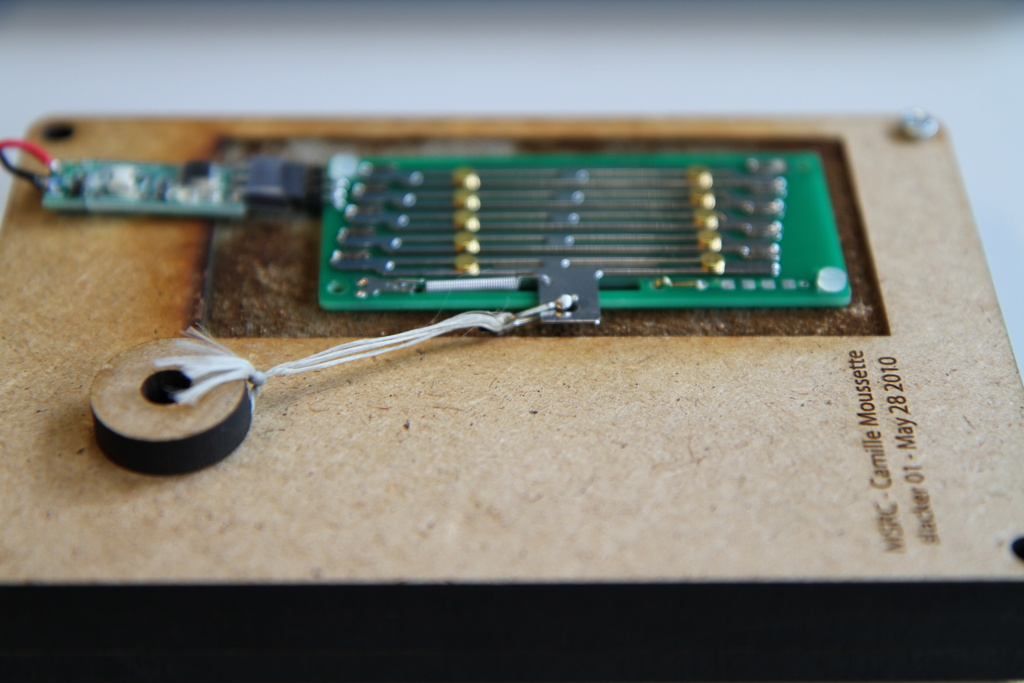
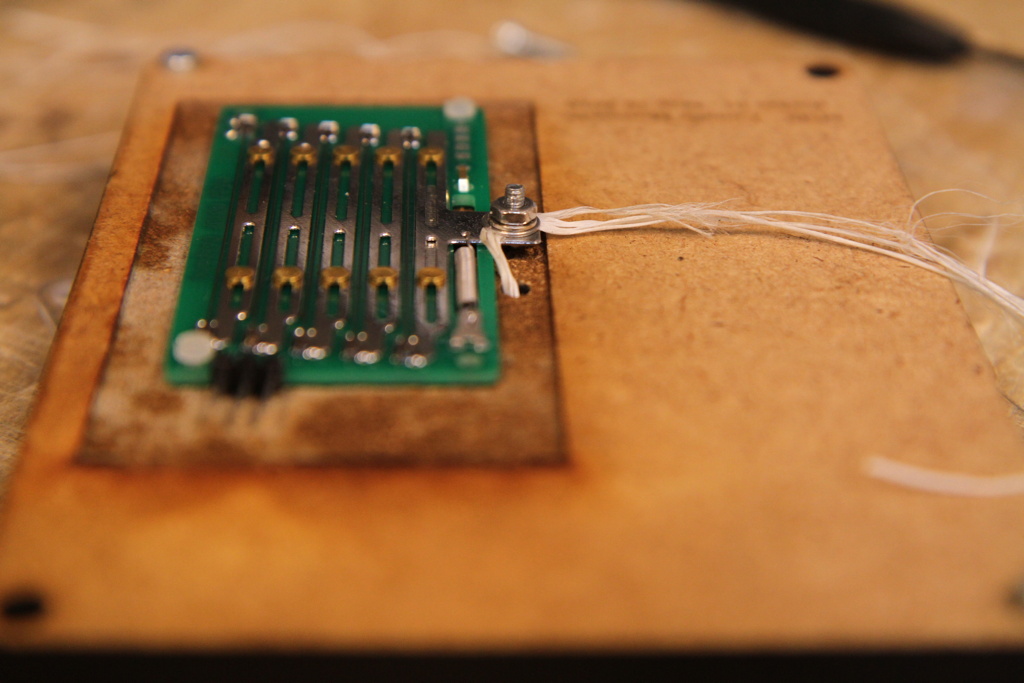
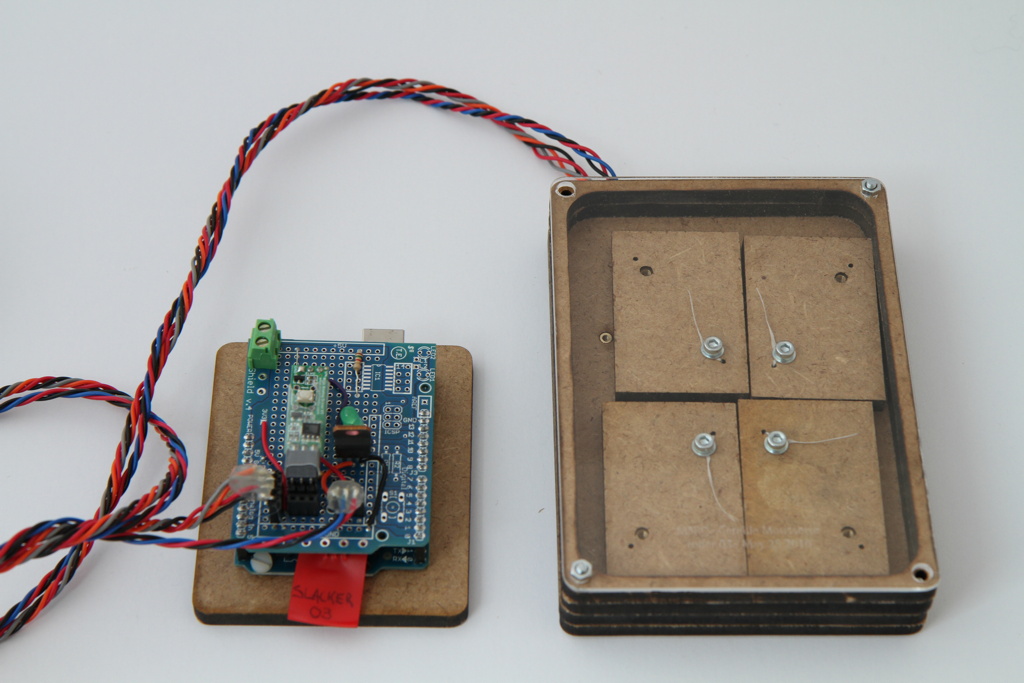
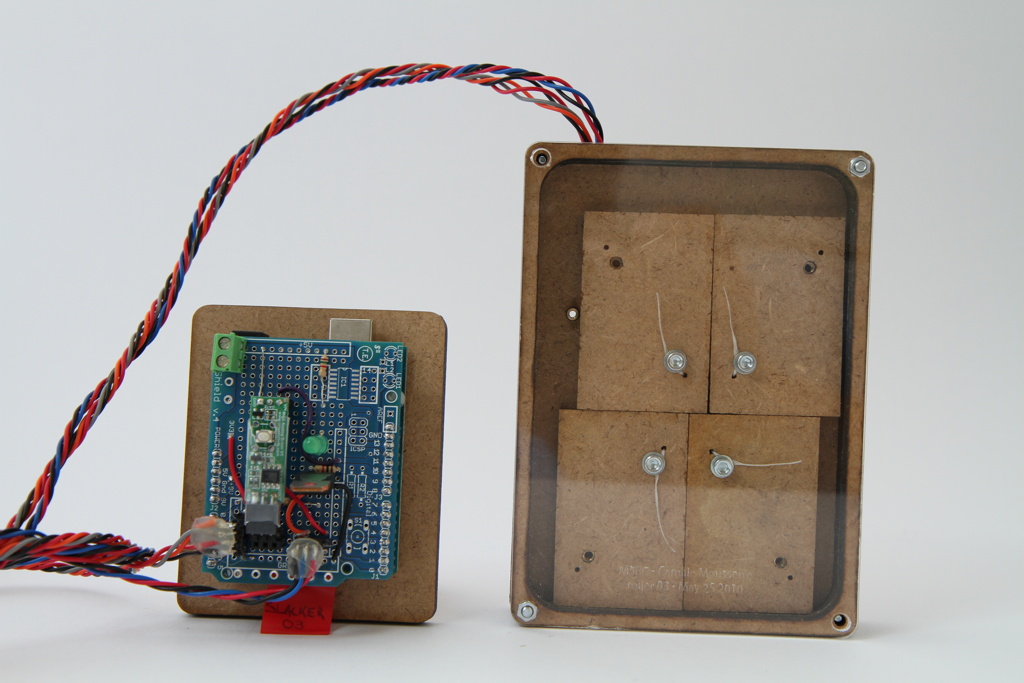
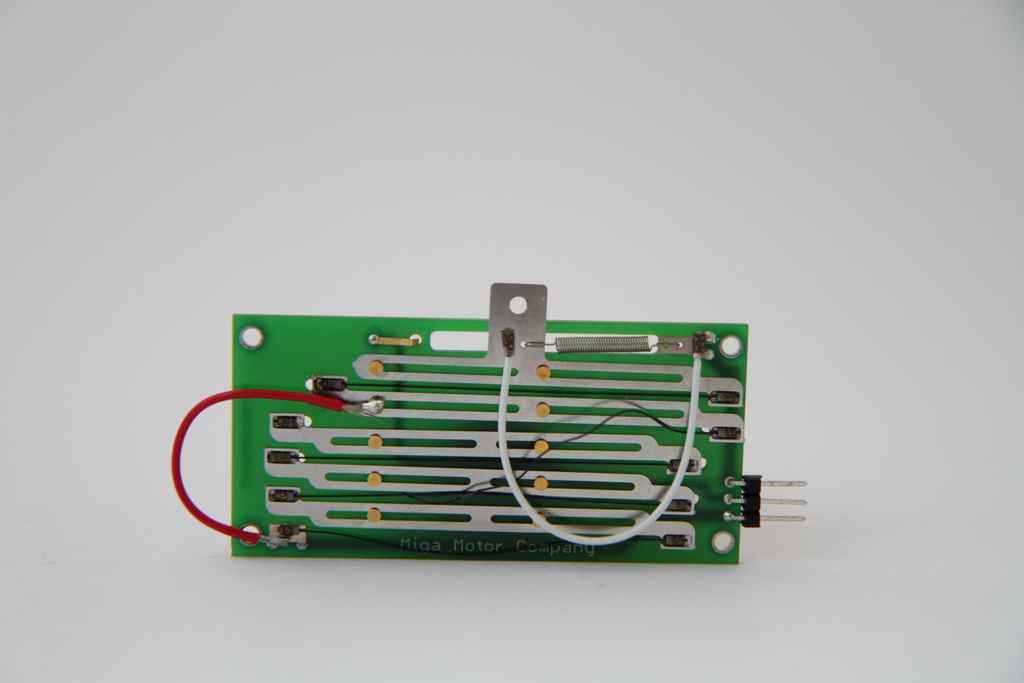
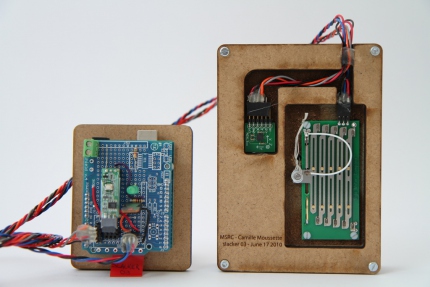
Internal parts have wire (dental floss) attached and when collectively pulled, they compress and solidify. The actuator is a muscle wire kit from Miga. It provides quite a lot of force over 1.5 cm of travel. It is silent and has a very organic feel. I also added a manual grip to activate it manually.
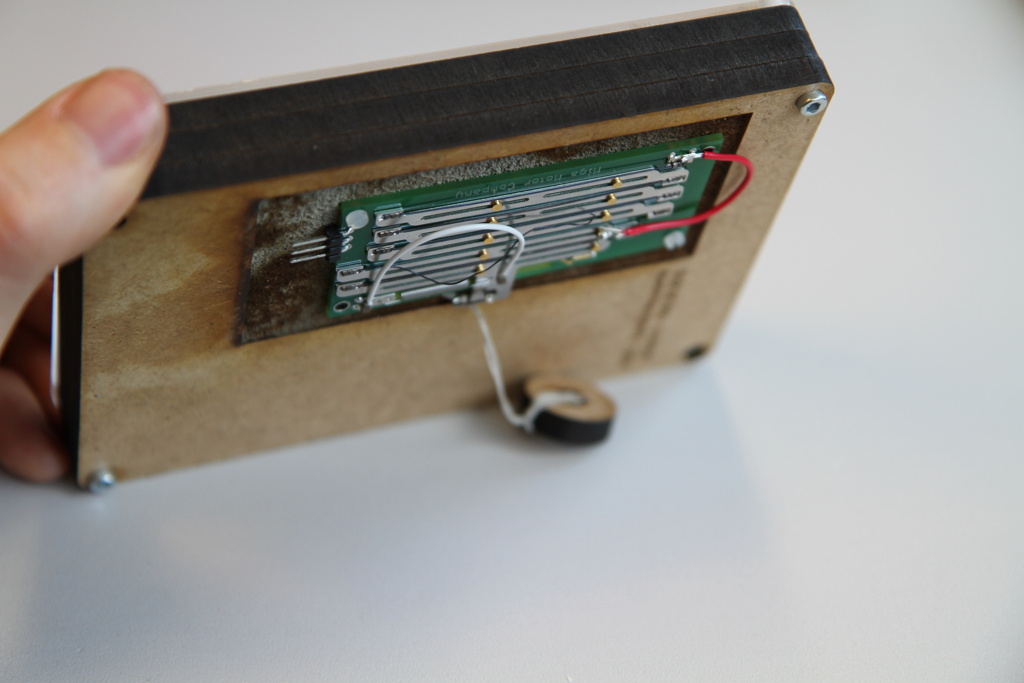
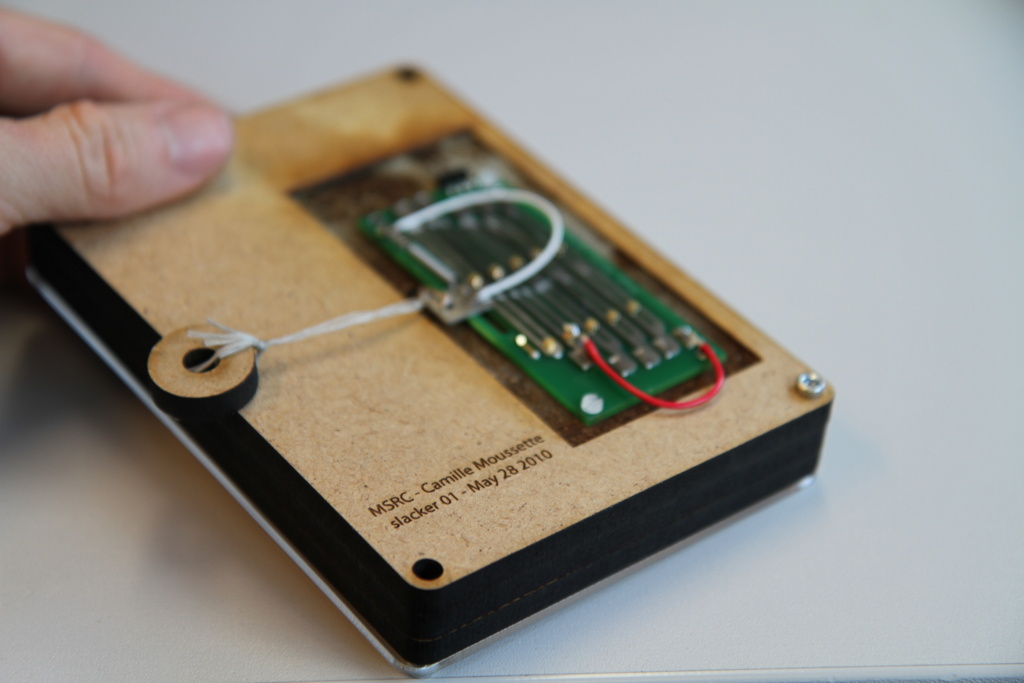
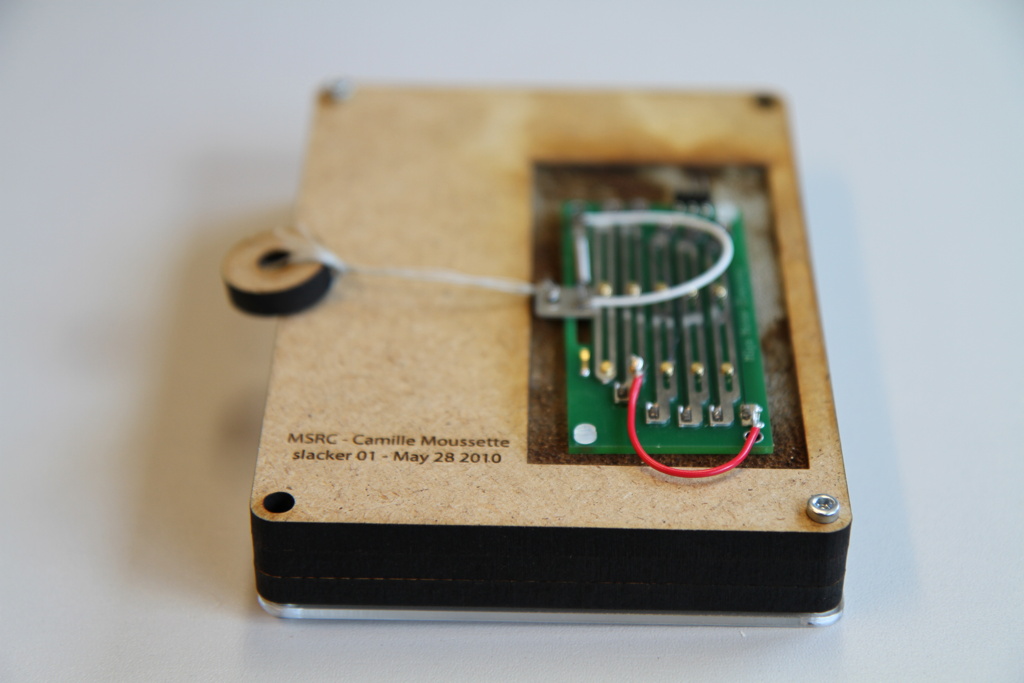
Slacker 02
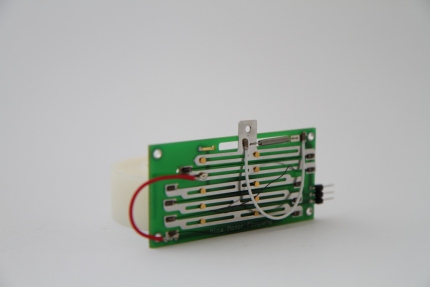
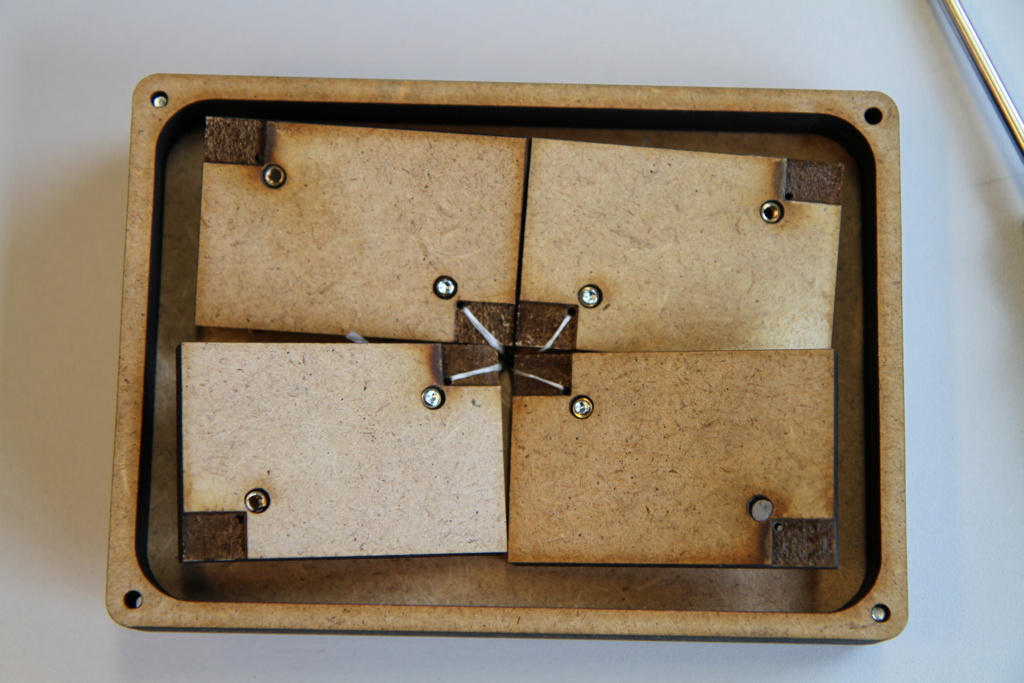
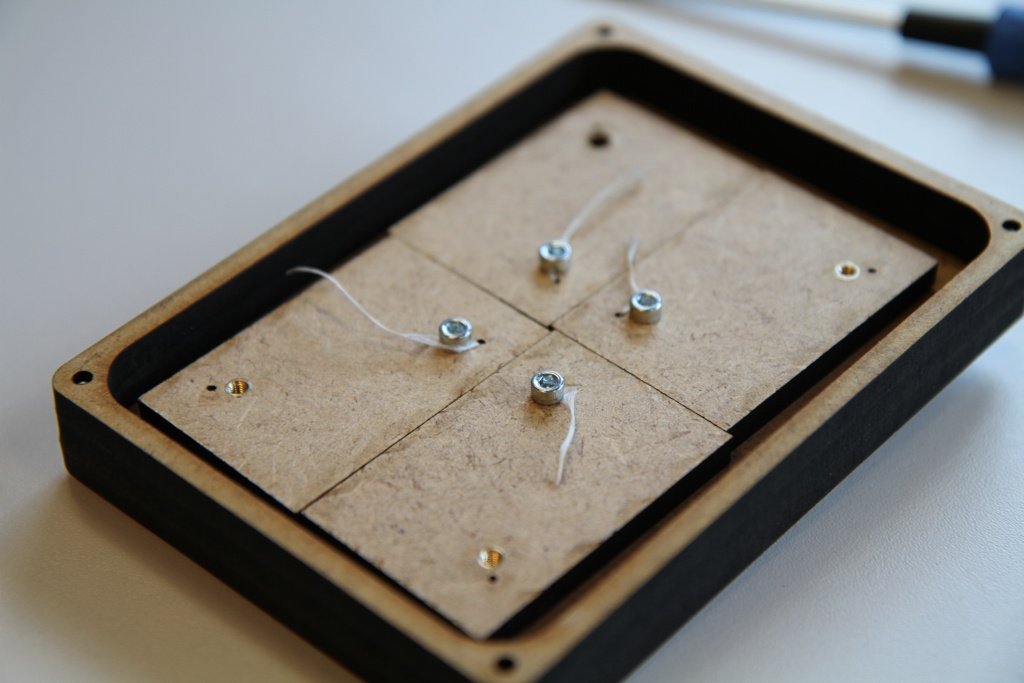
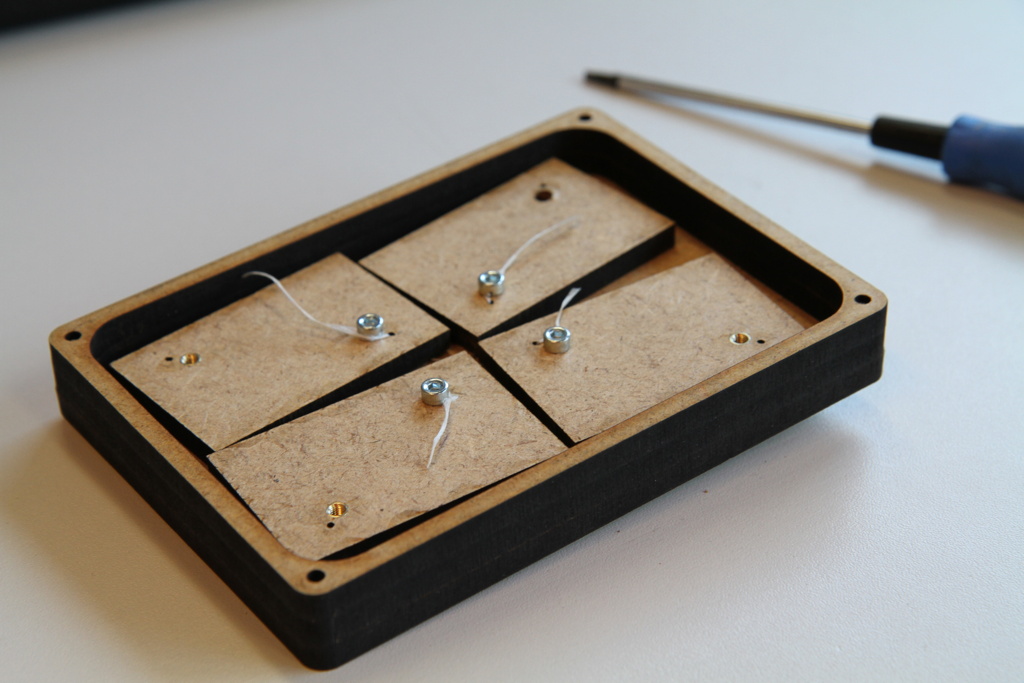
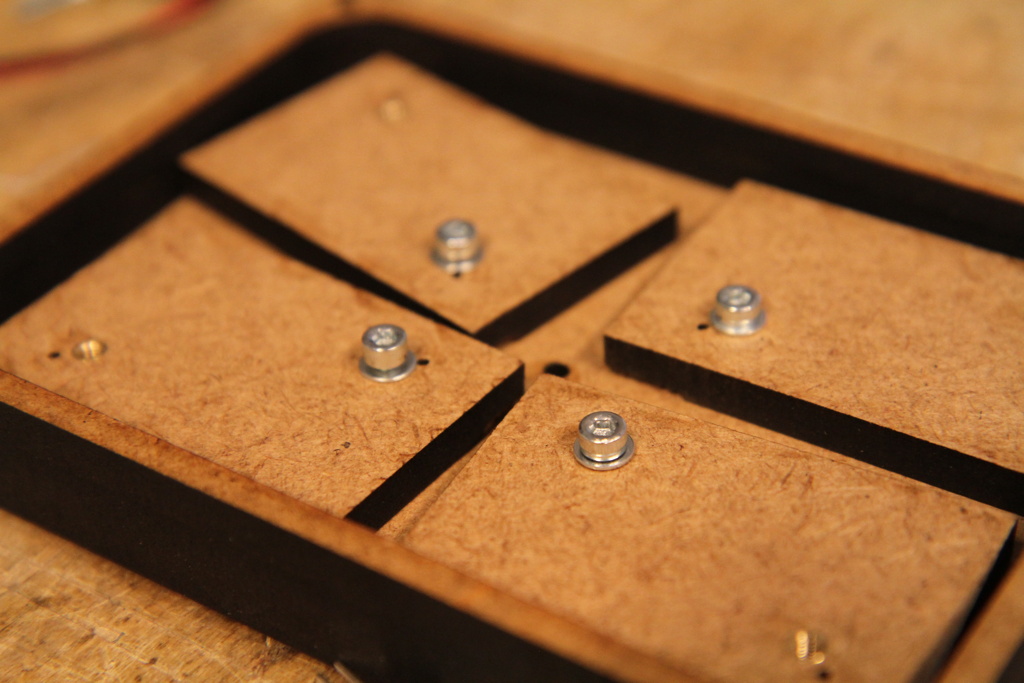
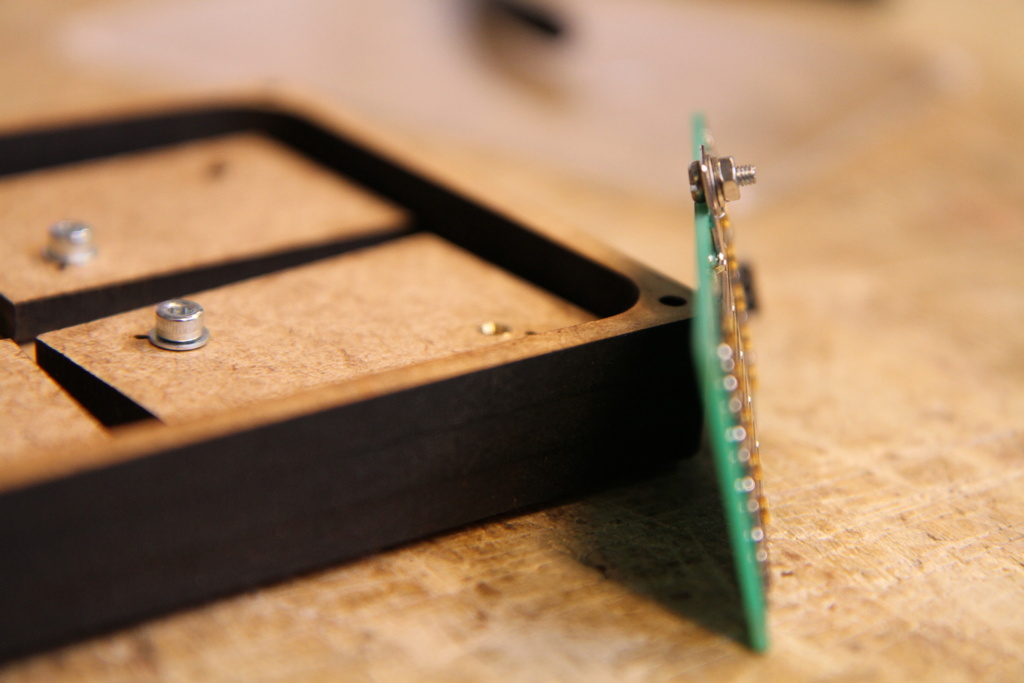
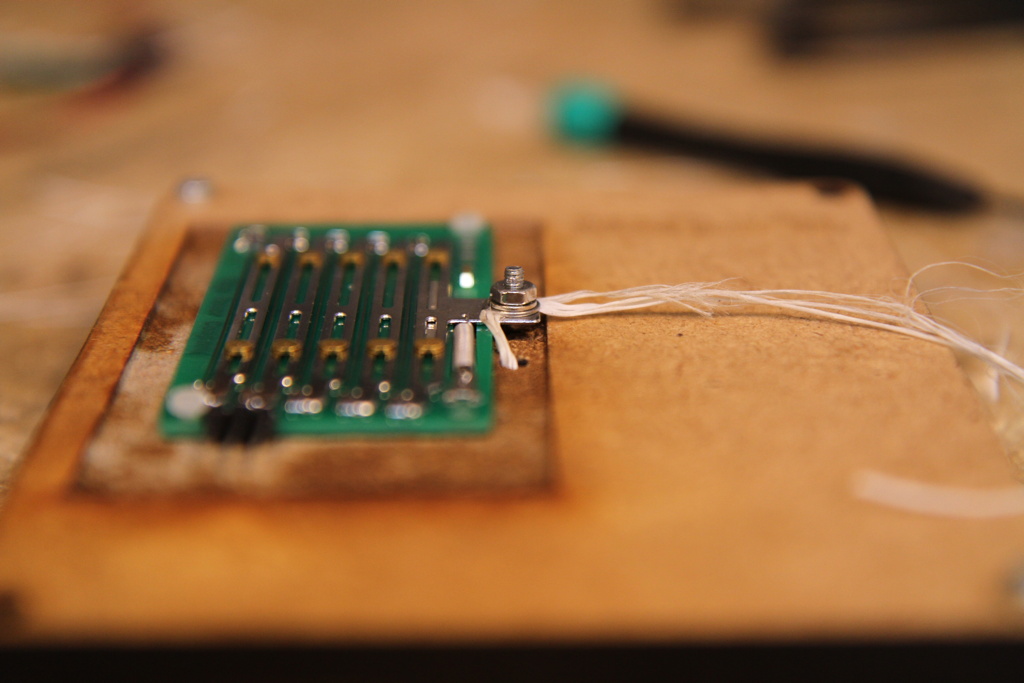
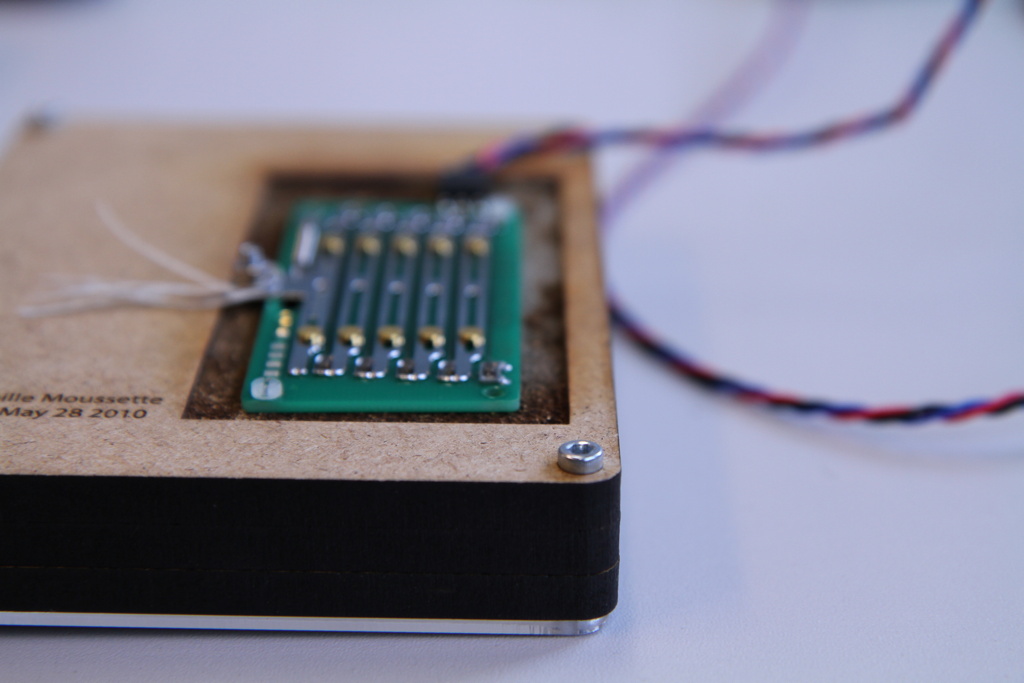
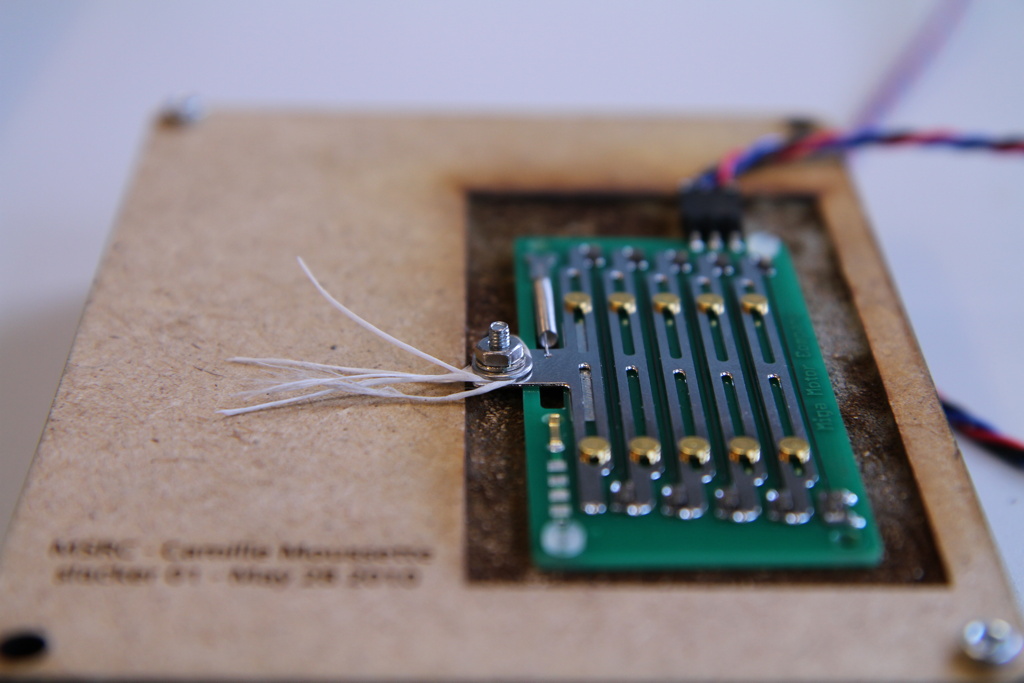
I made a second iteration after the muscle wire actuator broke down. I reused the casing and the floating parts. Here you can see the broken actuator. The shape-memory alloy shrinks ~4% when heated. It was quite tedious to adjust all the dental floss wire equally, as they stretch over time. Having a unbalanced pull reduce the clutching effect.
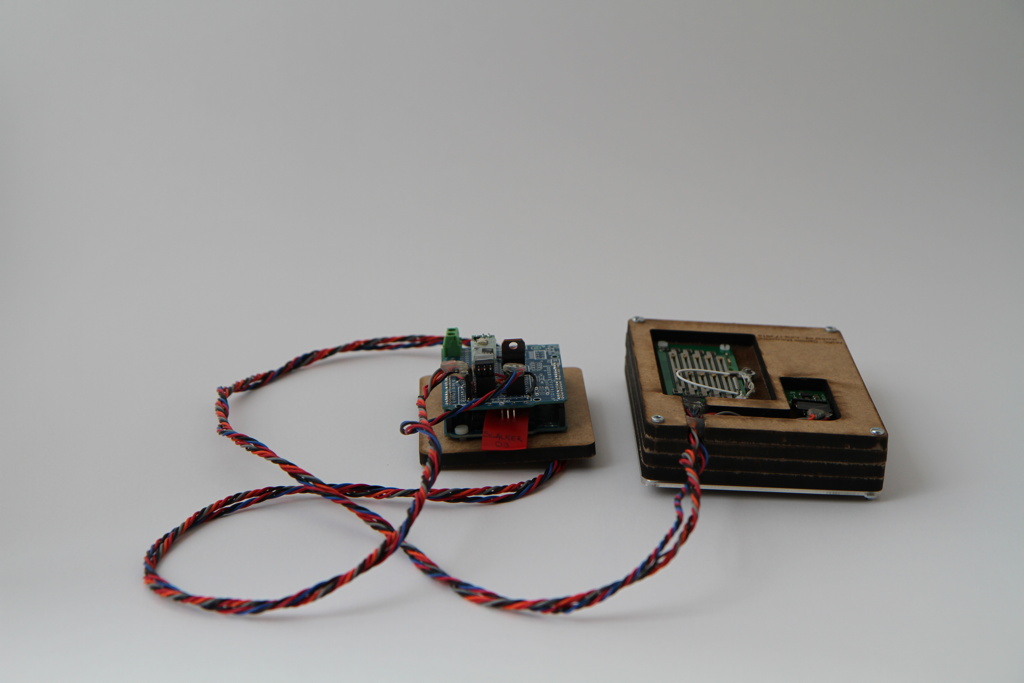
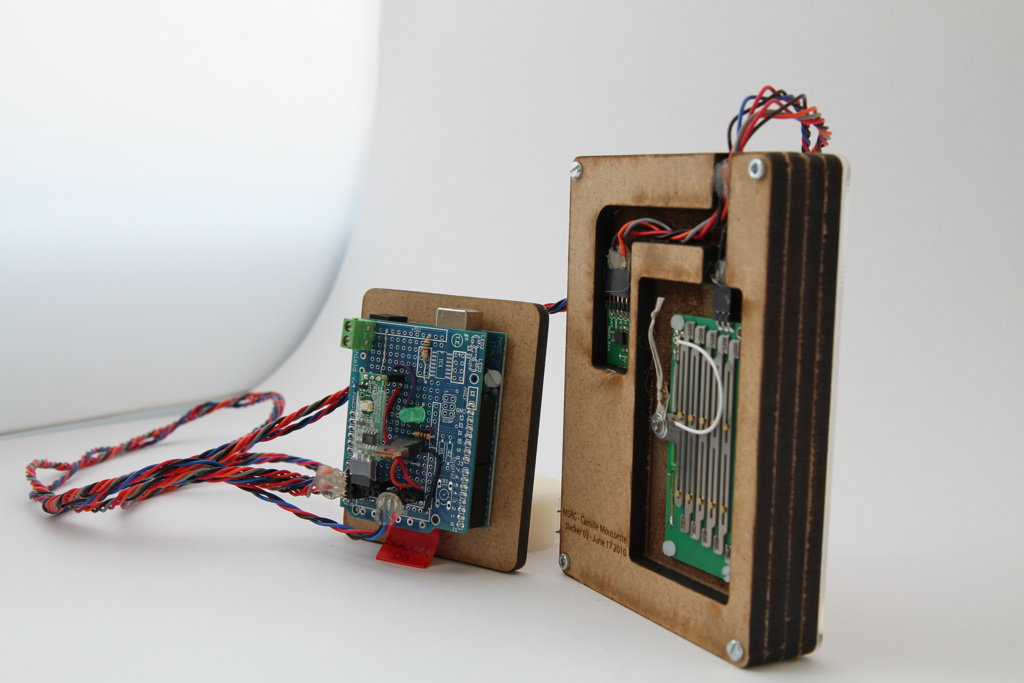
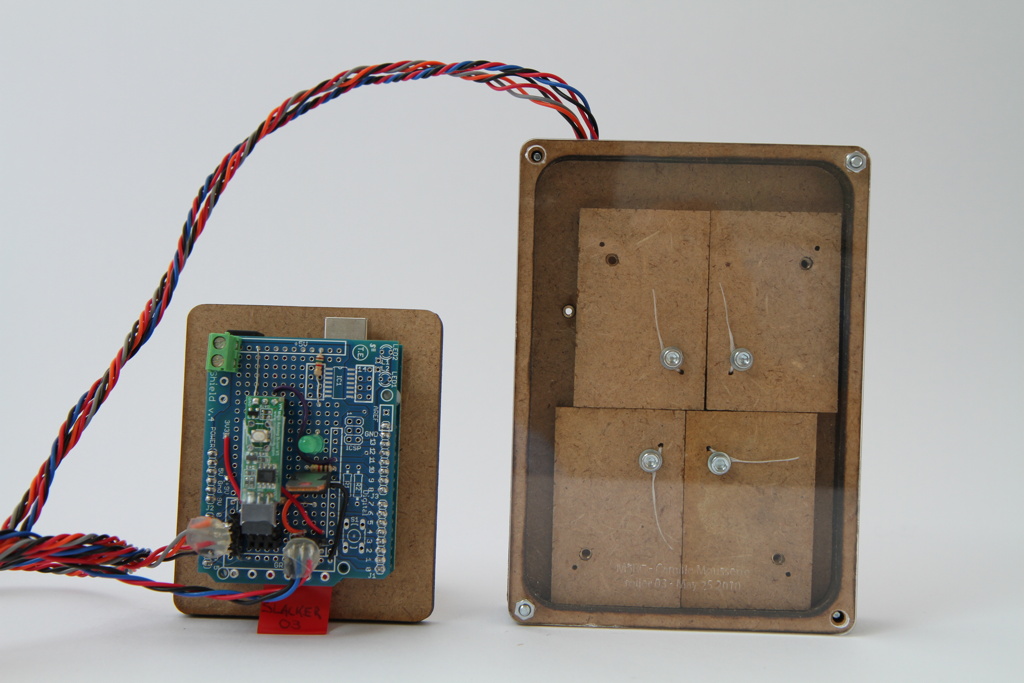
At this time, I also built various options to control the muscle wire, to avoid overheating and possibly try to have some level of position control. I opted for a dual mode circuit: manual control with a button press, and computer-controlled via the Arduino board.
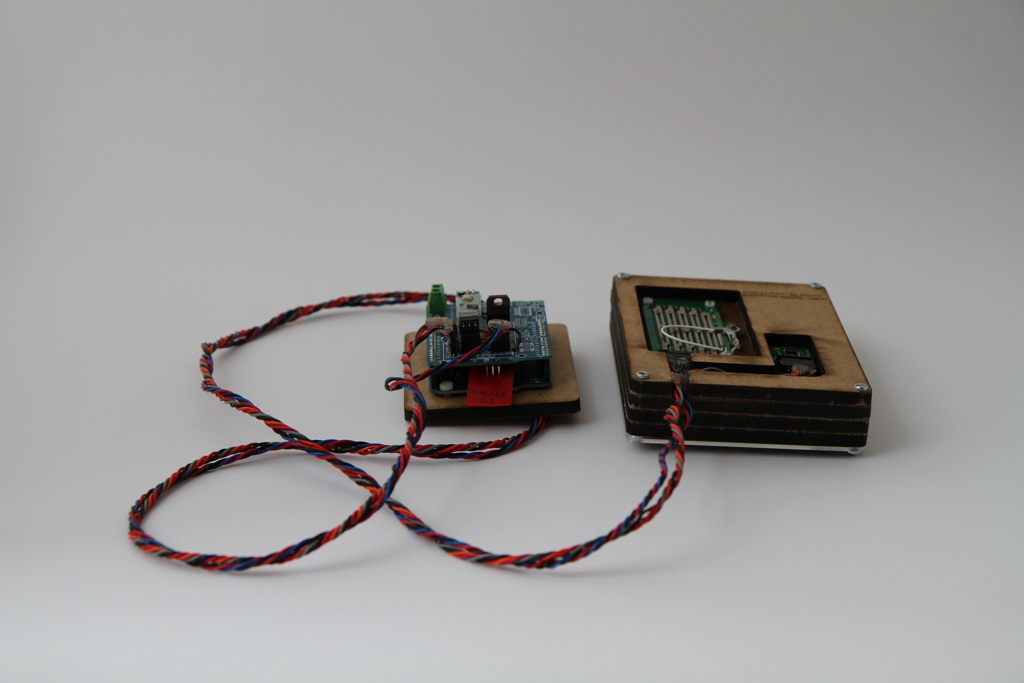
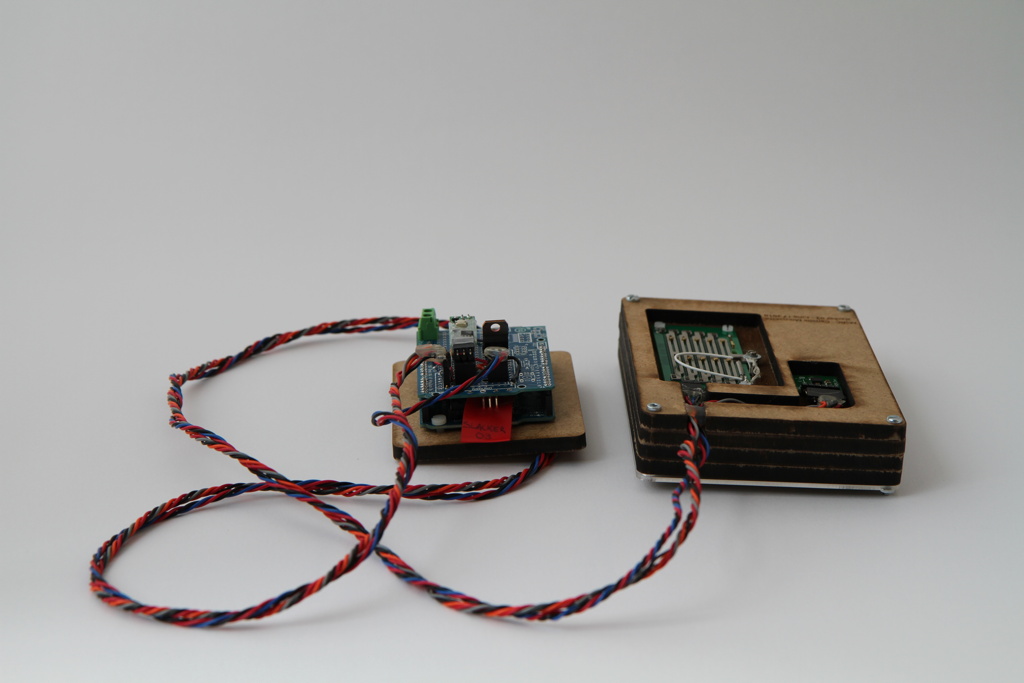
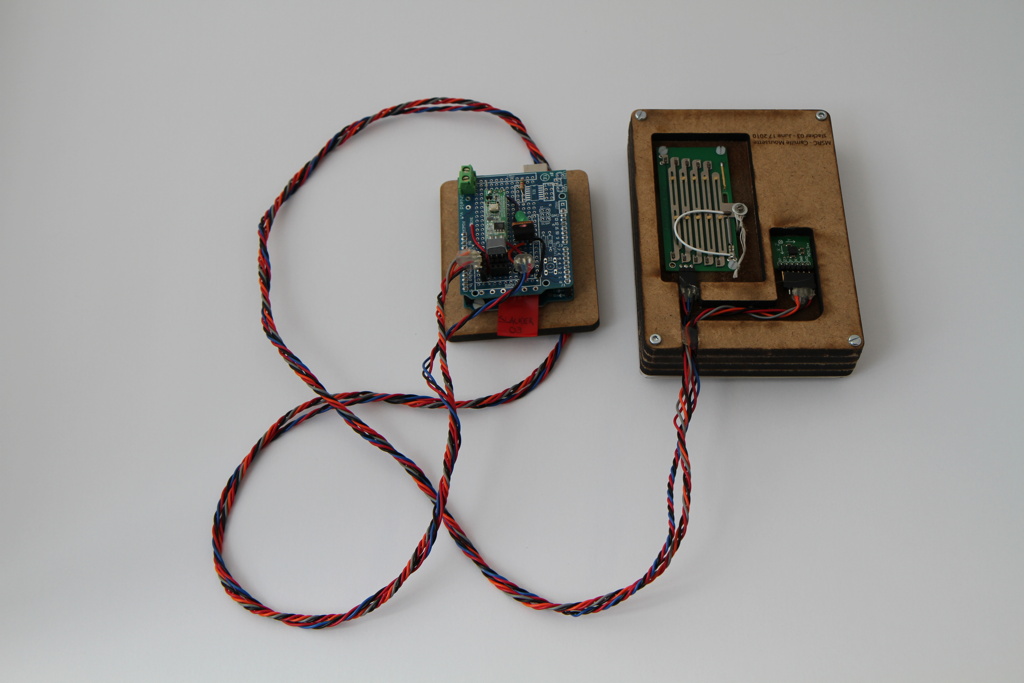
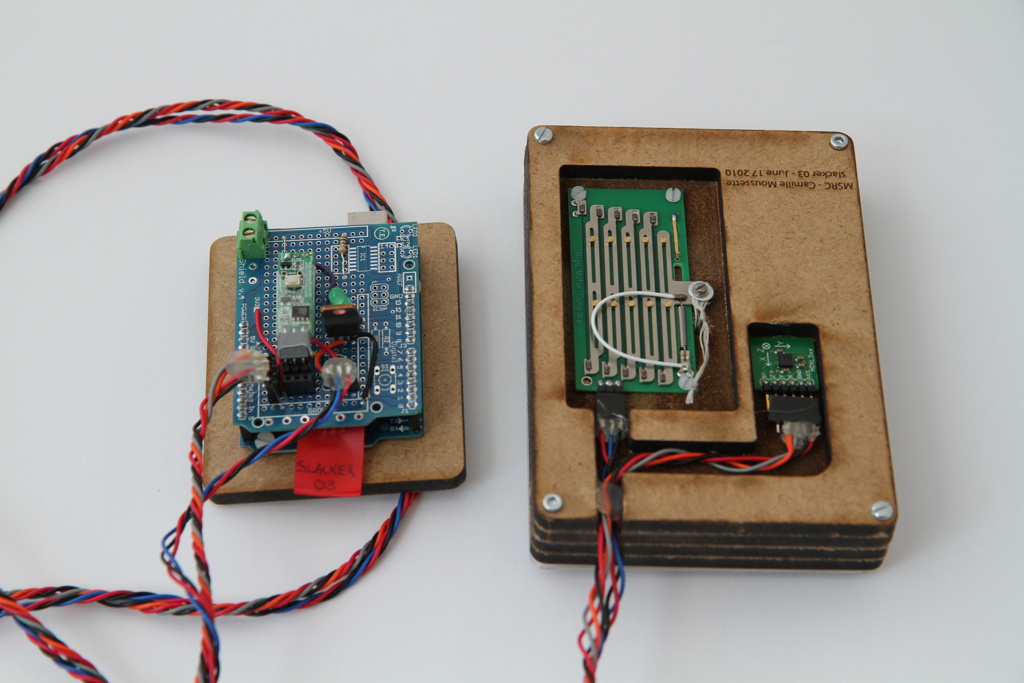
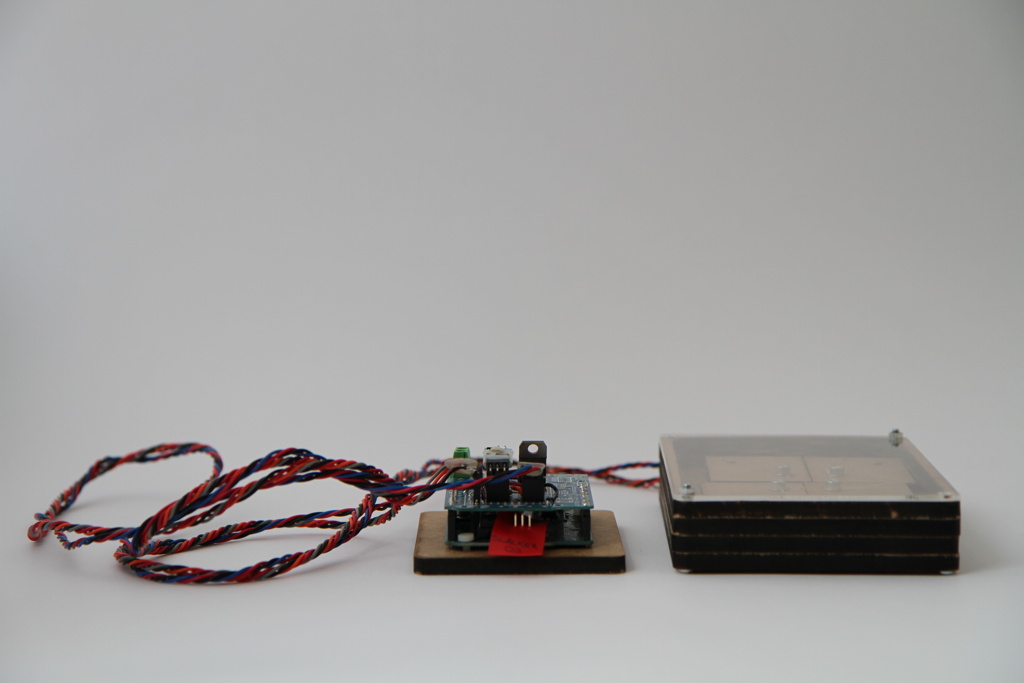
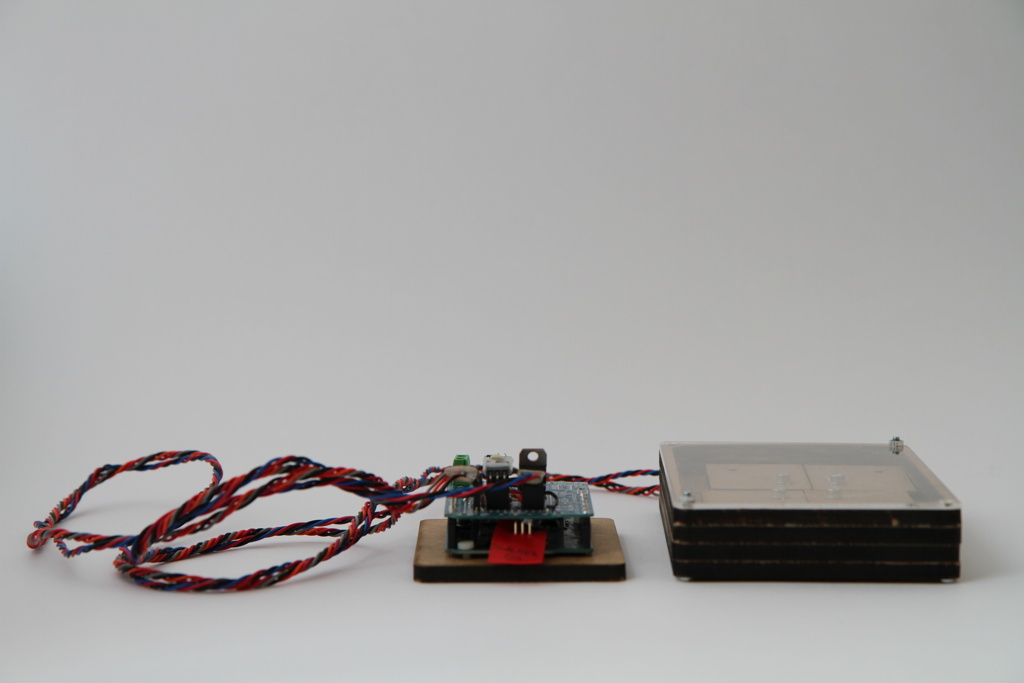
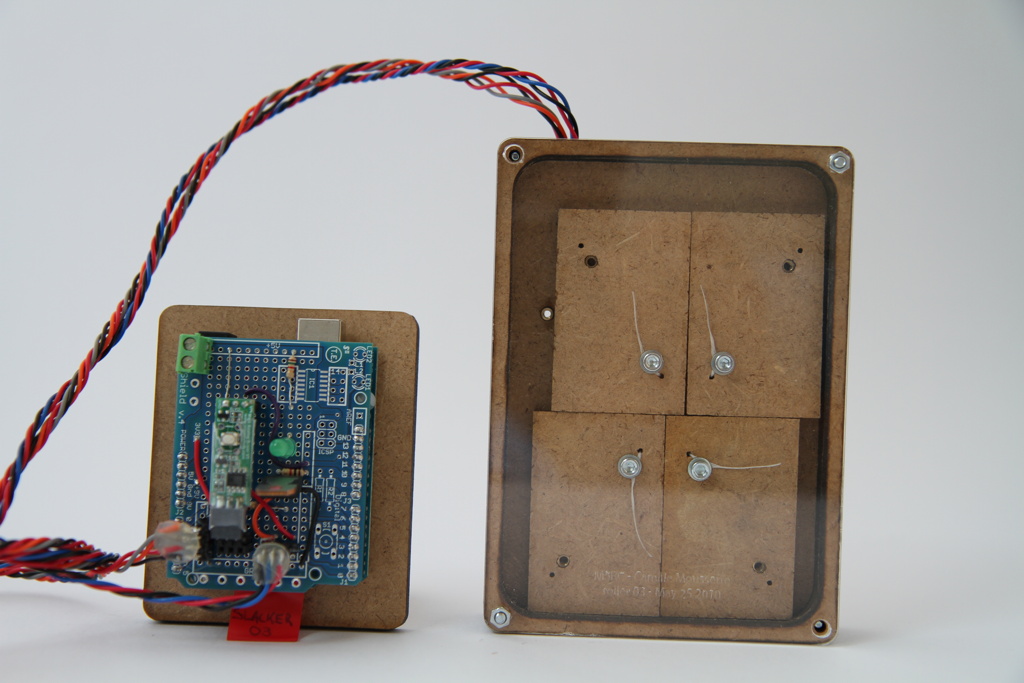
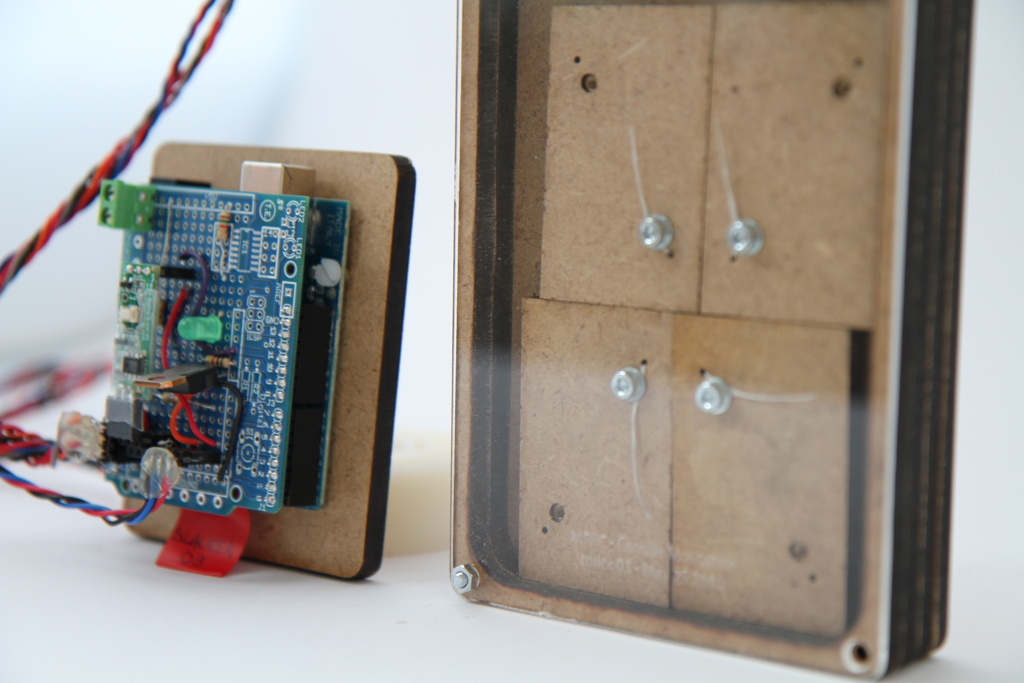
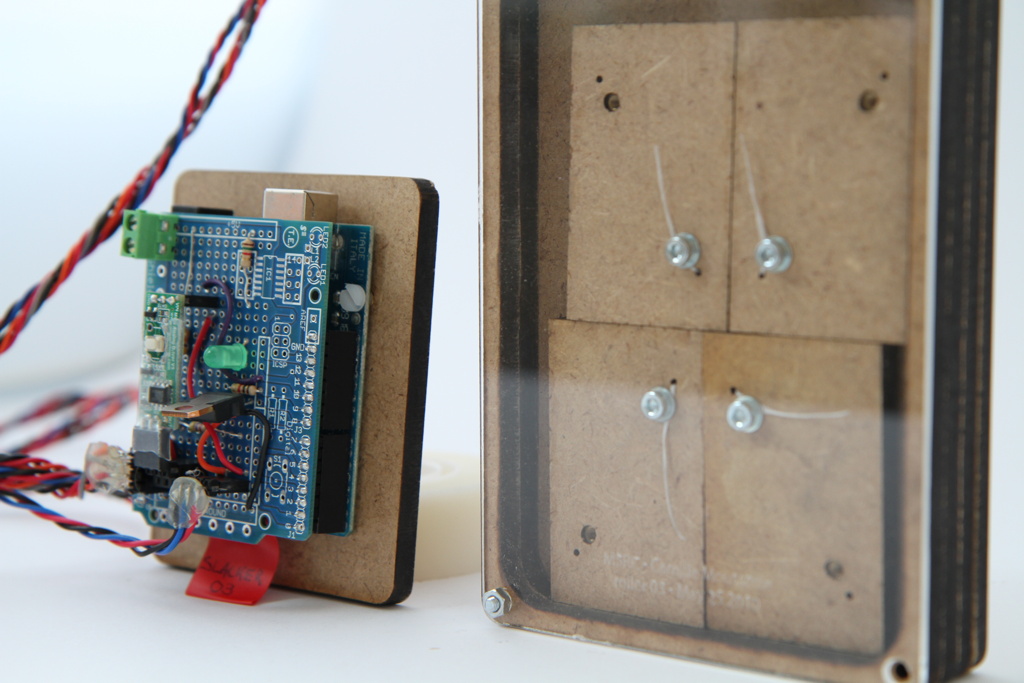
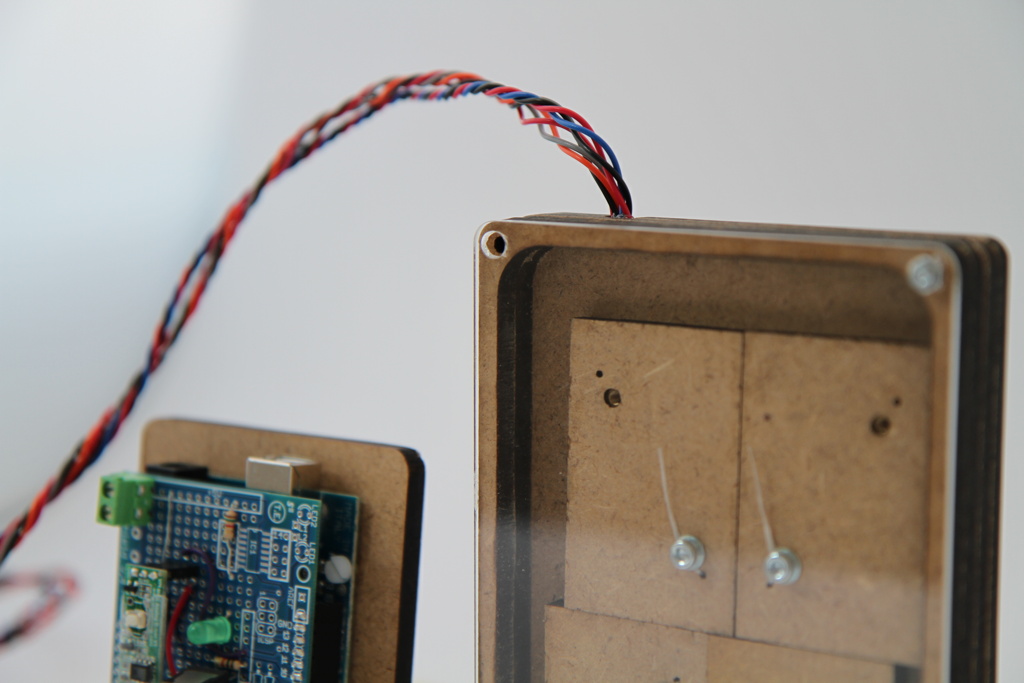
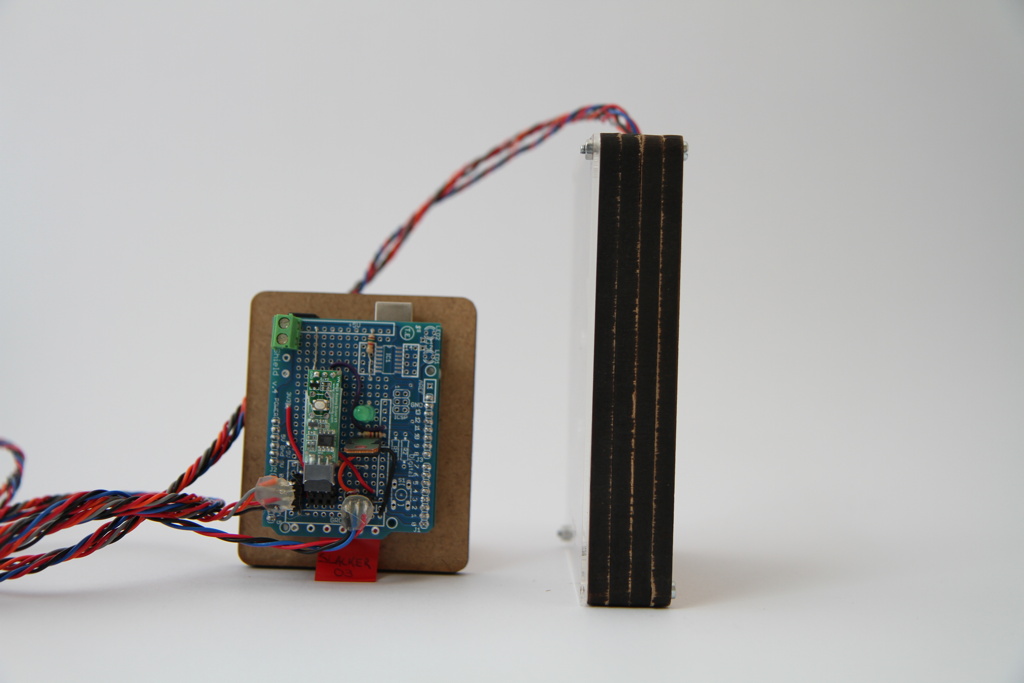
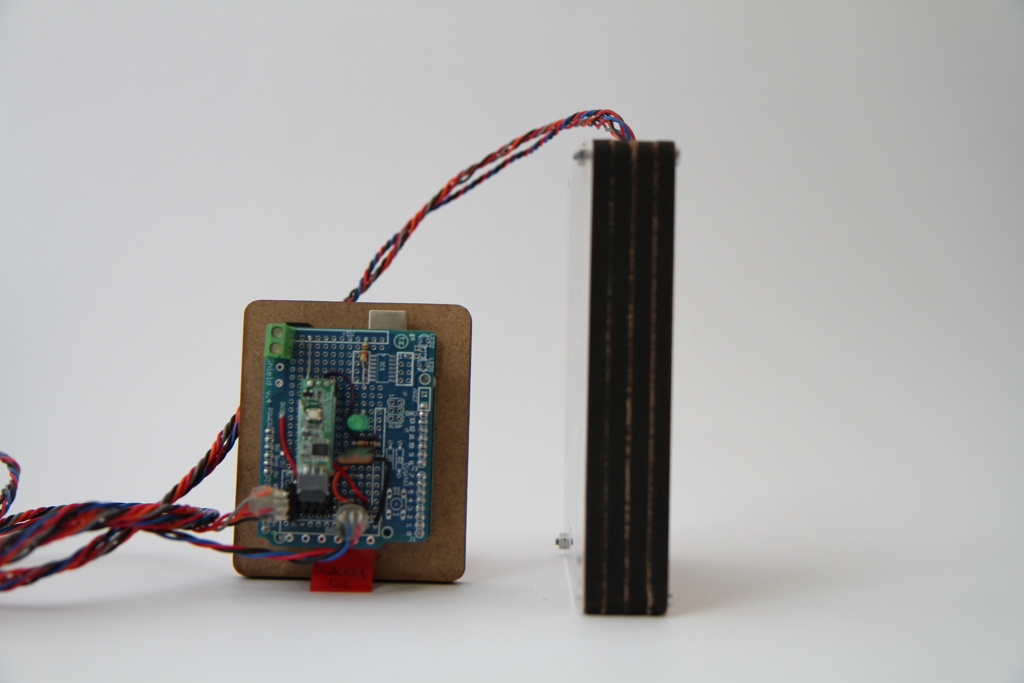
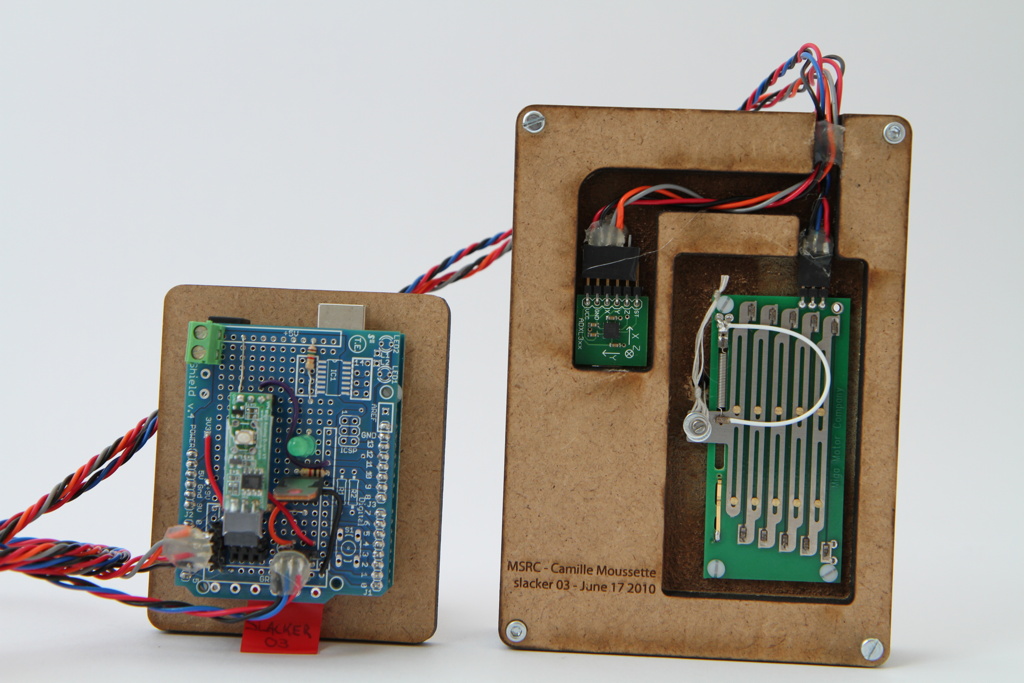
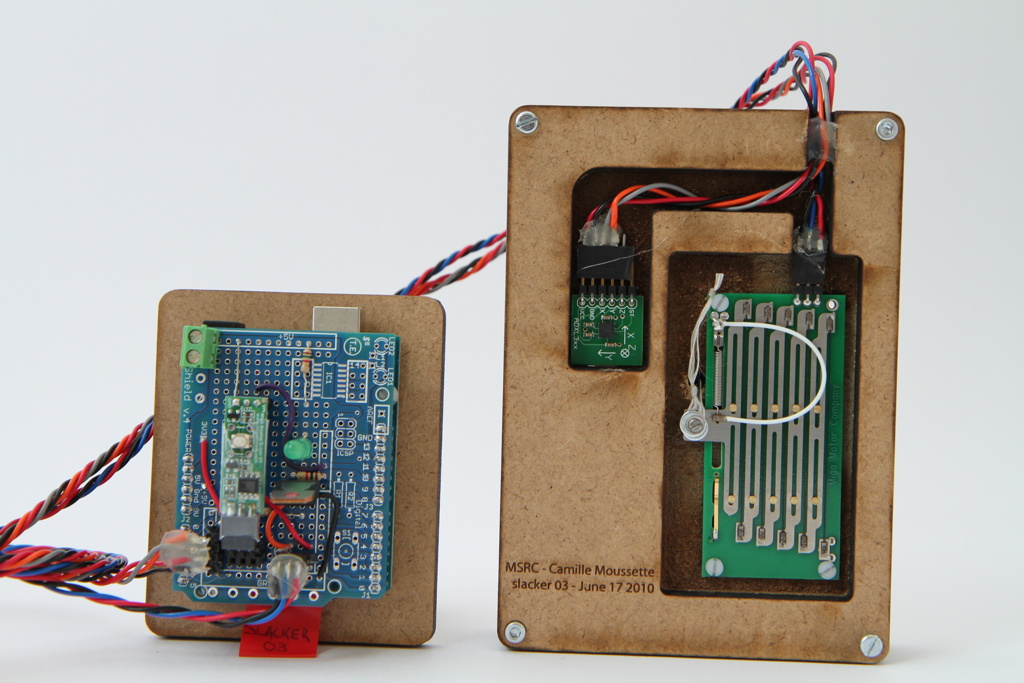
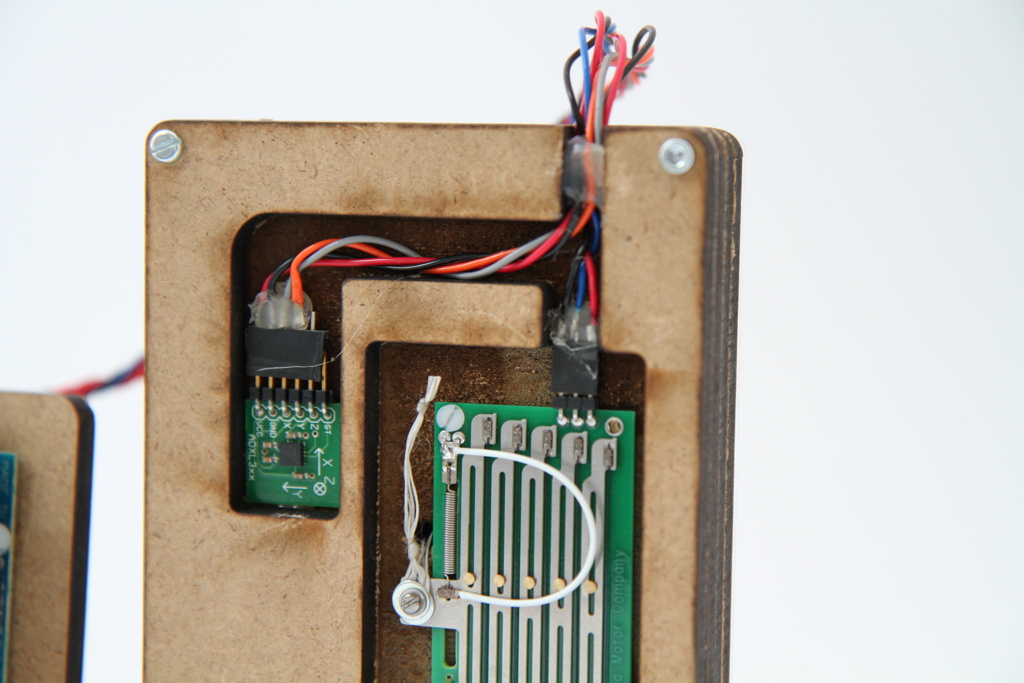
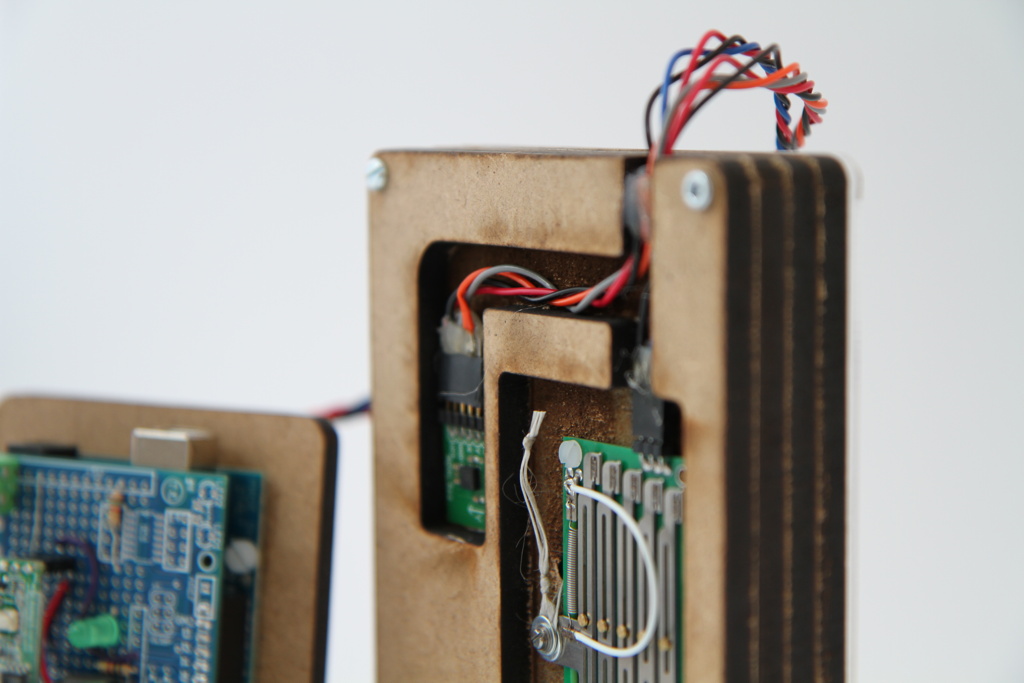
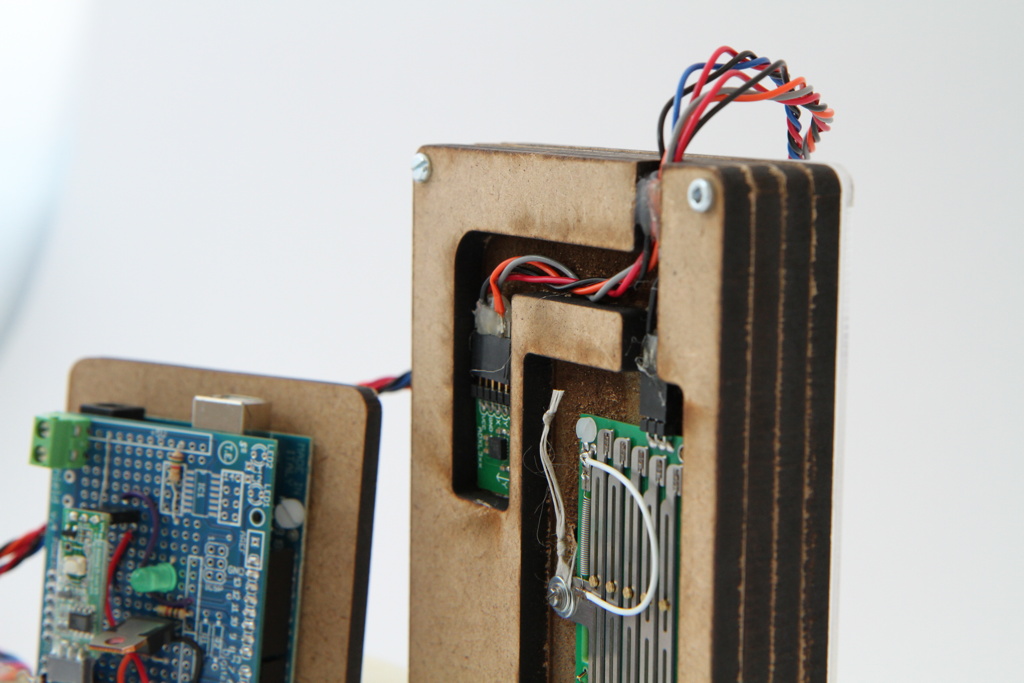
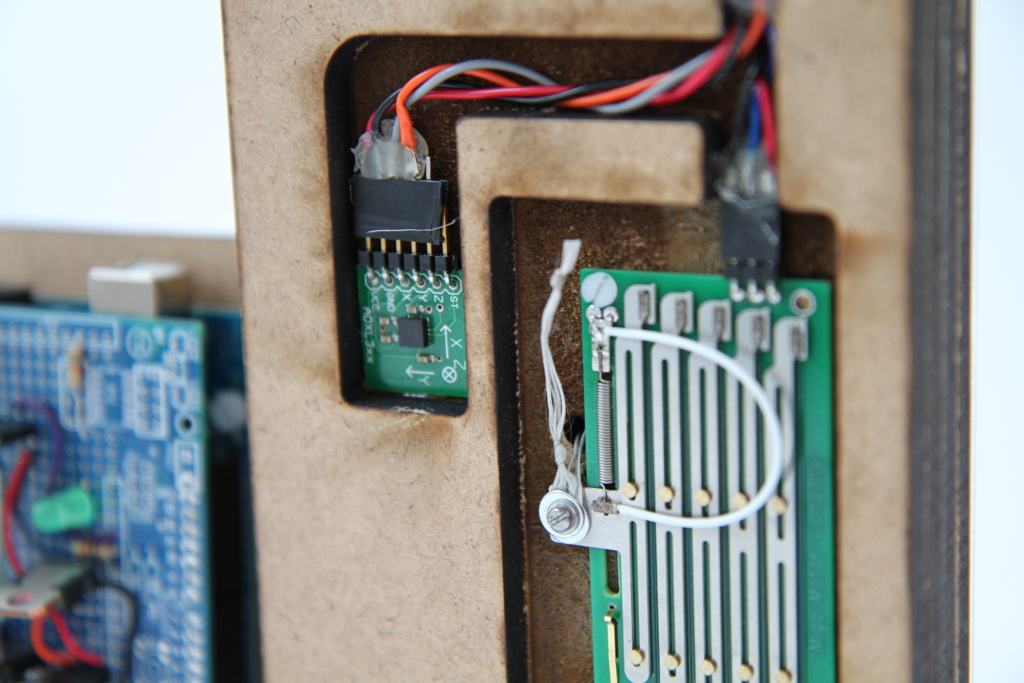
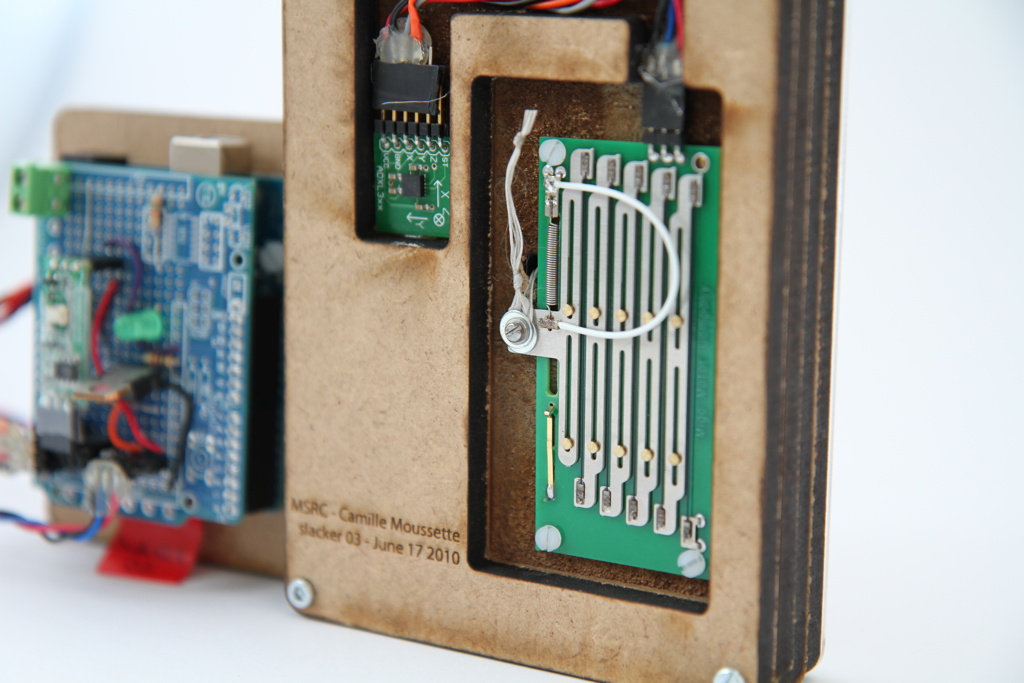
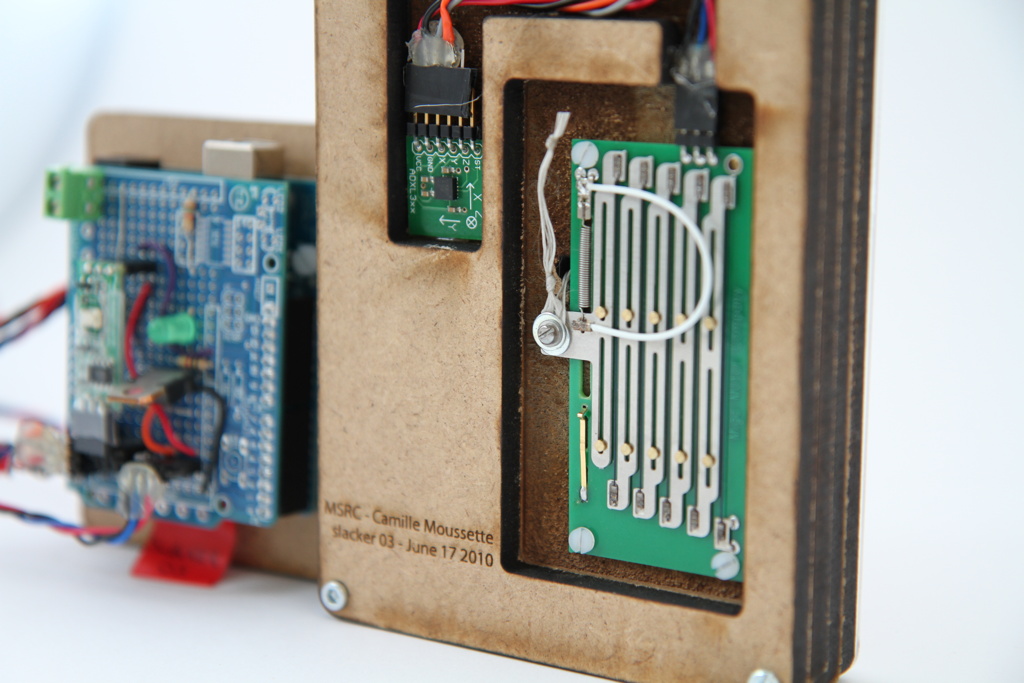
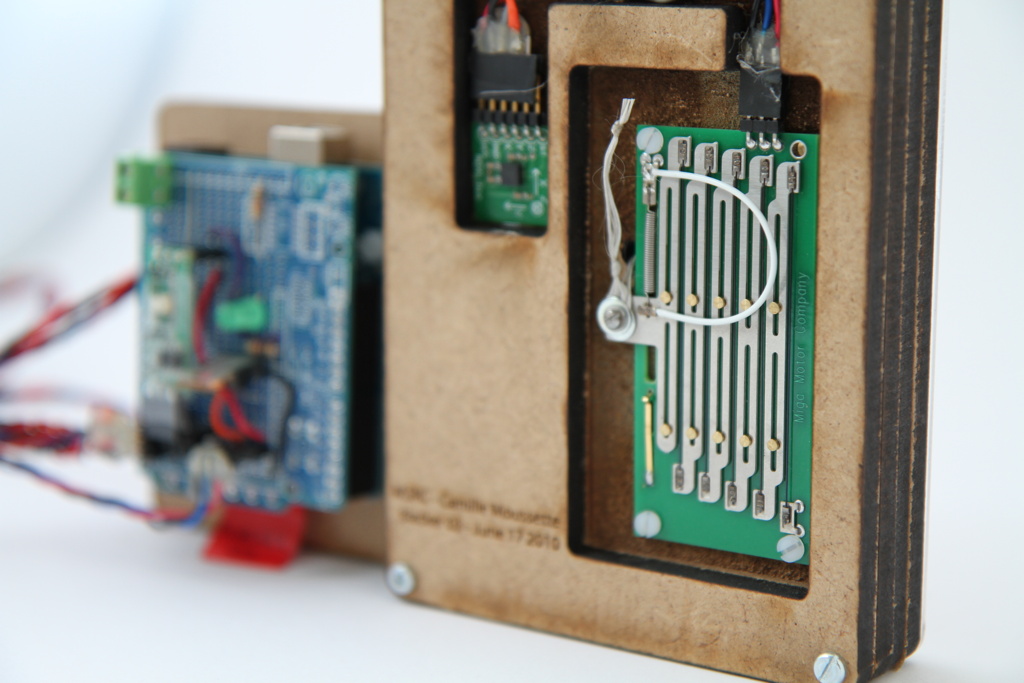
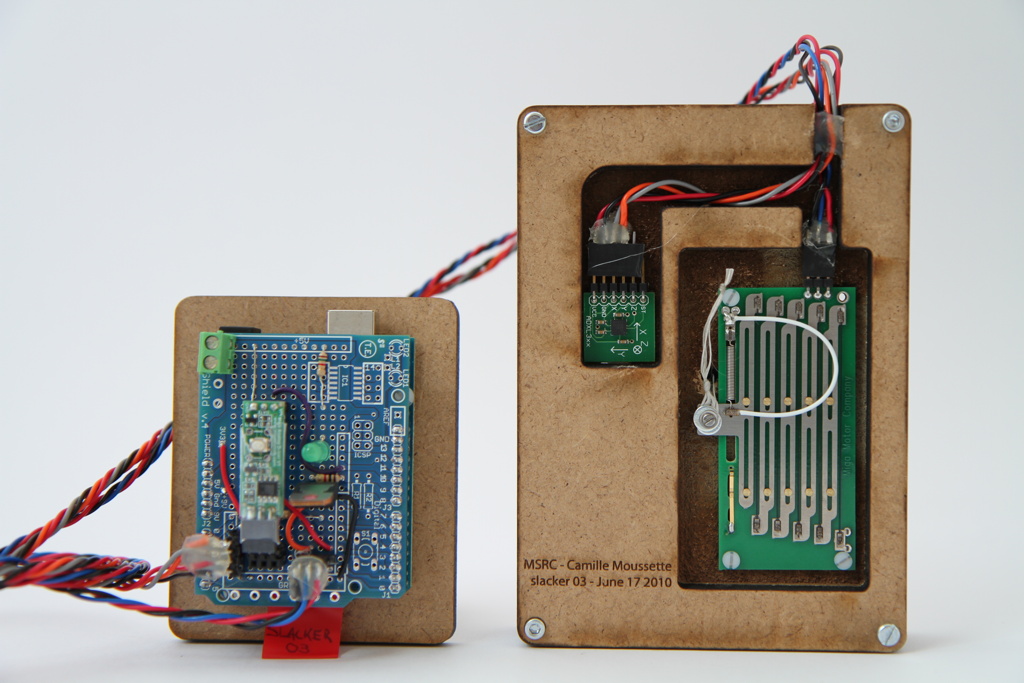
Slacker 03 (final)
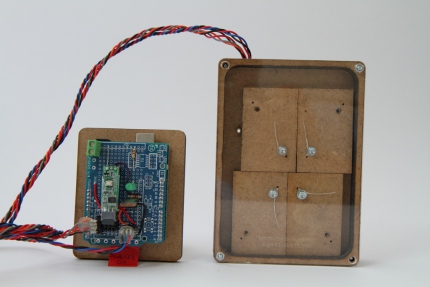
In this third and last iteration, I used an accelerometer to trigger the pull. This way I there is no need for an UI. Shacking strongly 6-7 times will engage the unit, and the loose and shaky feeling disappears. It takes about 3-5 seconds to reset the unit, as the muscle wire has to cool down to return to its regular elongated state.
Videos

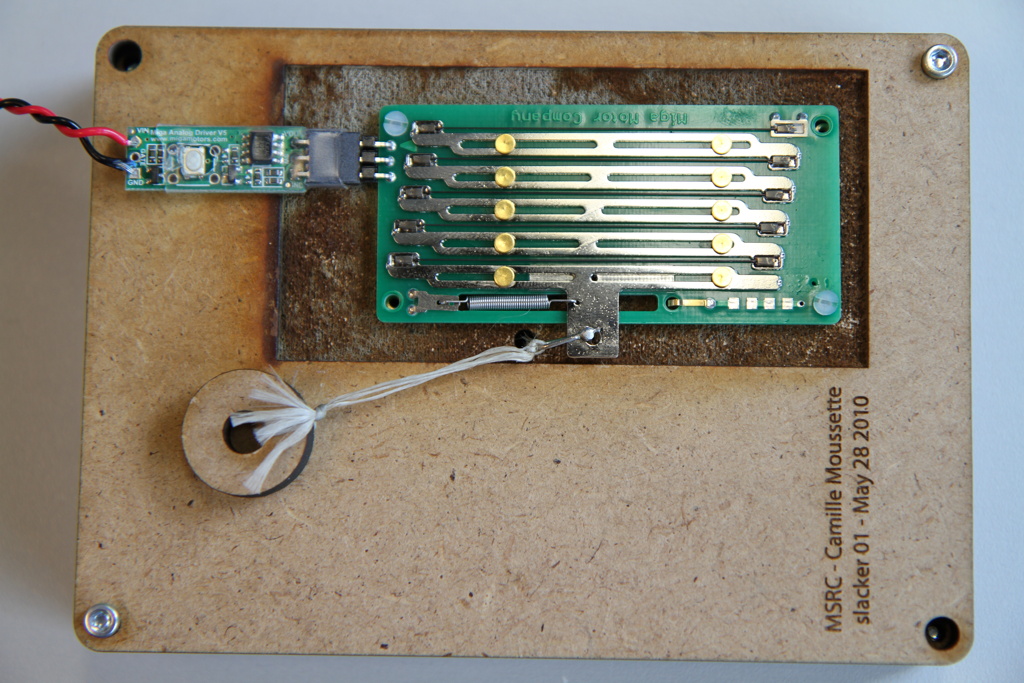
Internal parts have wire (dental floss) attached and when collectively pulled, they compress and solidify. The actuator is a muscle wire kit from Miga. It provides quite a lot of force over 1.5 cm of travel. It is silent and has a very organic feel. I also added a manual grip to activate it manually.
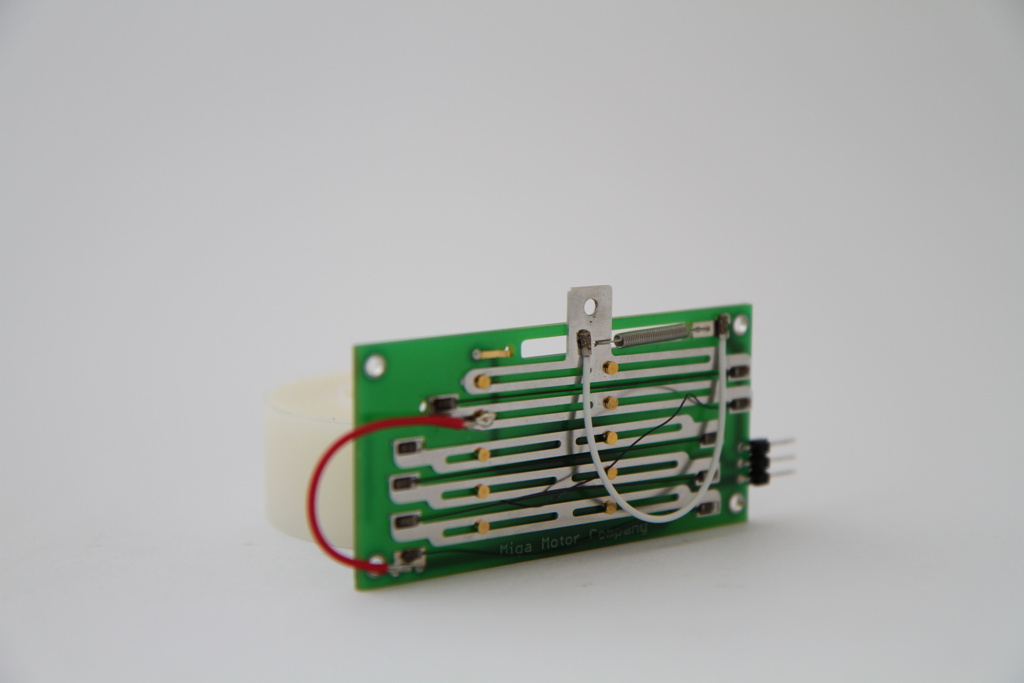
I made a second iteration after the muscle wire actuator broke down. I reused the casing and the floating parts. Here you can see the broken actuator. The shape-memory alloy shrinks ~4% when heated. It was quite tedious to adjust all the dental floss wire equally, as they stretch over time. Having a unbalanced pull reduce the clutching effect.
At this time, I also built various options to control the muscle wire, to avoid overheating and possibly try to have some level of position control. I opted for a dual mode circuit: manual control with a button press, and computer-controlled via the Arduino board.
Slacker 03 (final)
In this third and last iteration, I used an accelerometer to trigger the pull. This way I there is no need for an UI. Shacking strongly 6-7 times will engage the unit, and the loose and shaky feeling disappears. It takes about 3-5 seconds to reset the unit, as the muscle wire has to cool down to return to its regular elongated state.
Videos
In this third and last iteration, I used an accelerometer to trigger the pull. This way I there is no need for an UI. Shacking strongly 6-7 times will engage the unit, and the loose and shaky feeling disappears. It takes about 3-5 seconds to reset the unit, as the muscle wire has to cool down to return to its regular elongated state.
Related photos