2.2 Sketching Haptic Interactions
Concept
Have a weight moving around in circular motion inside the device. What are the qualities and particularities of having a center-of-mass moving in circular motion, versus in linear motion.
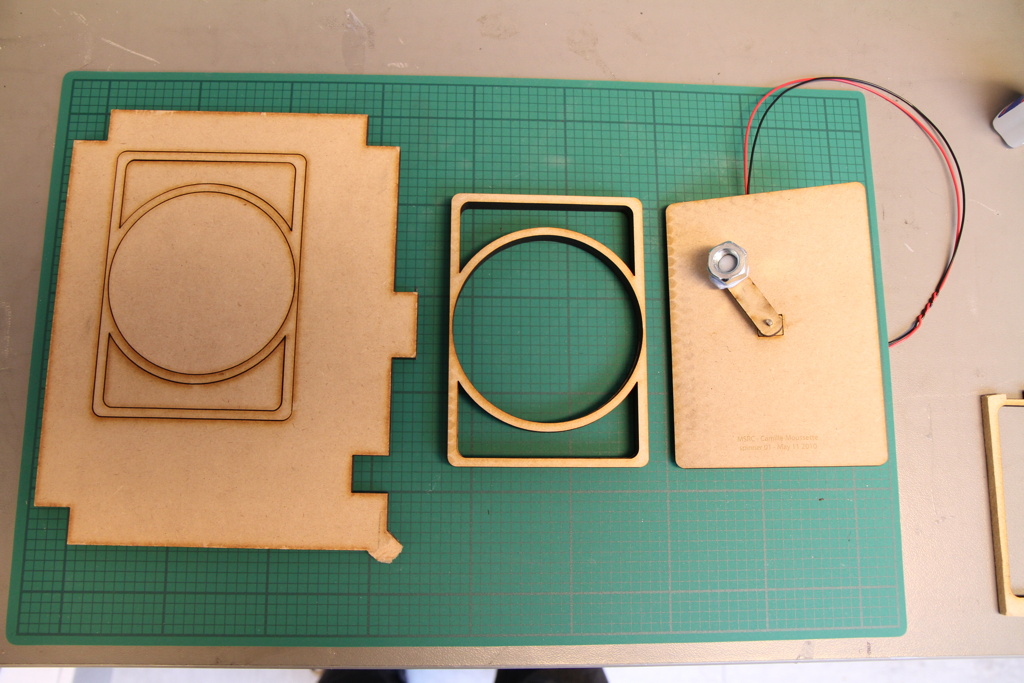
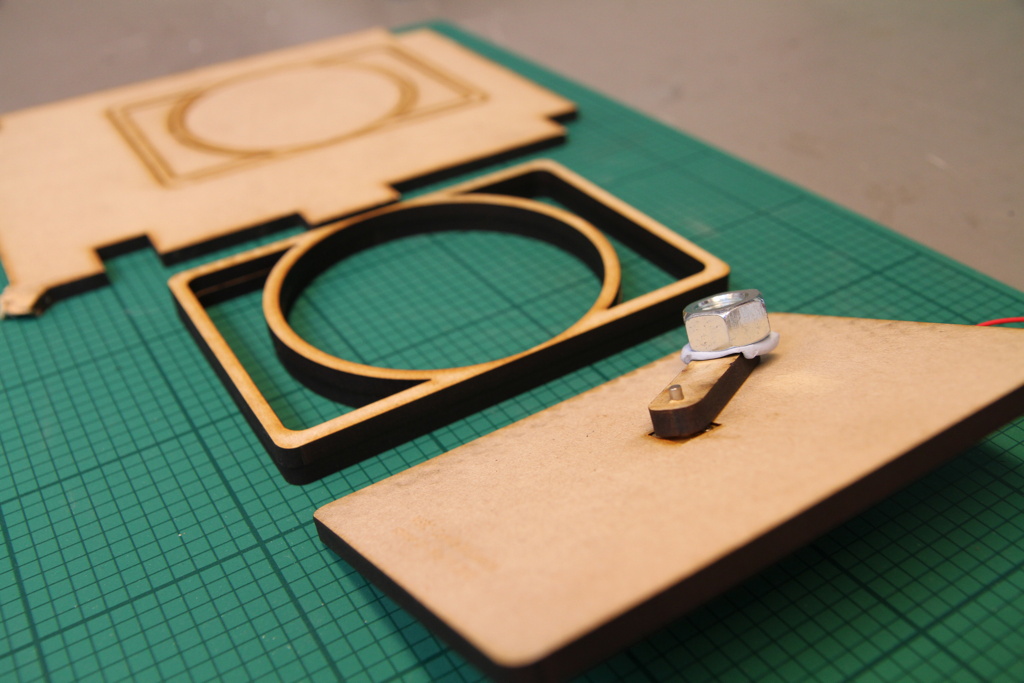
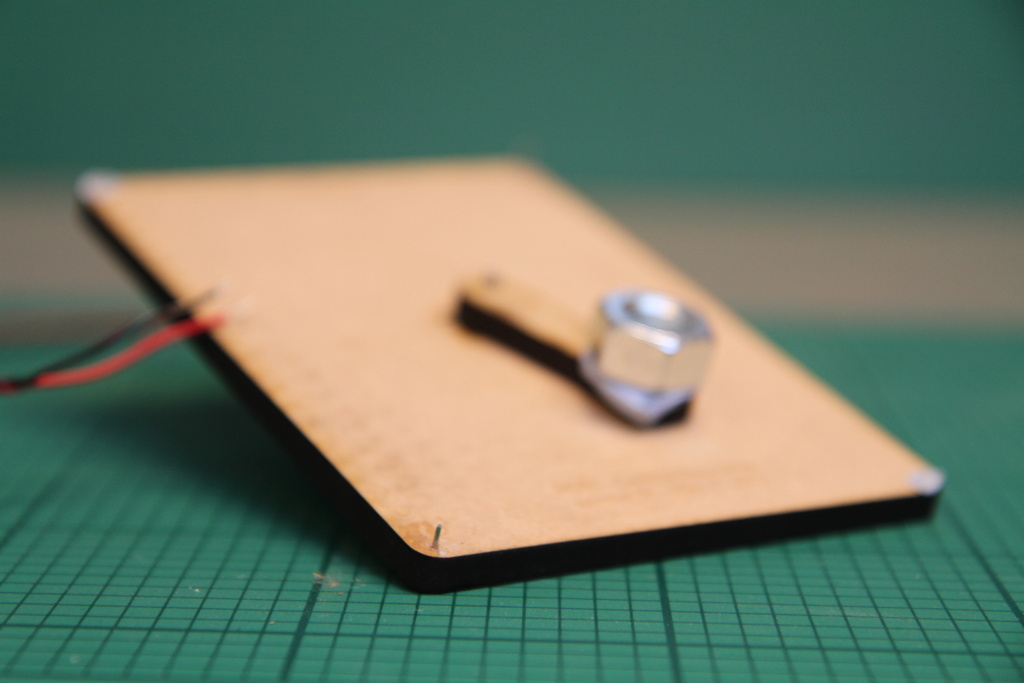
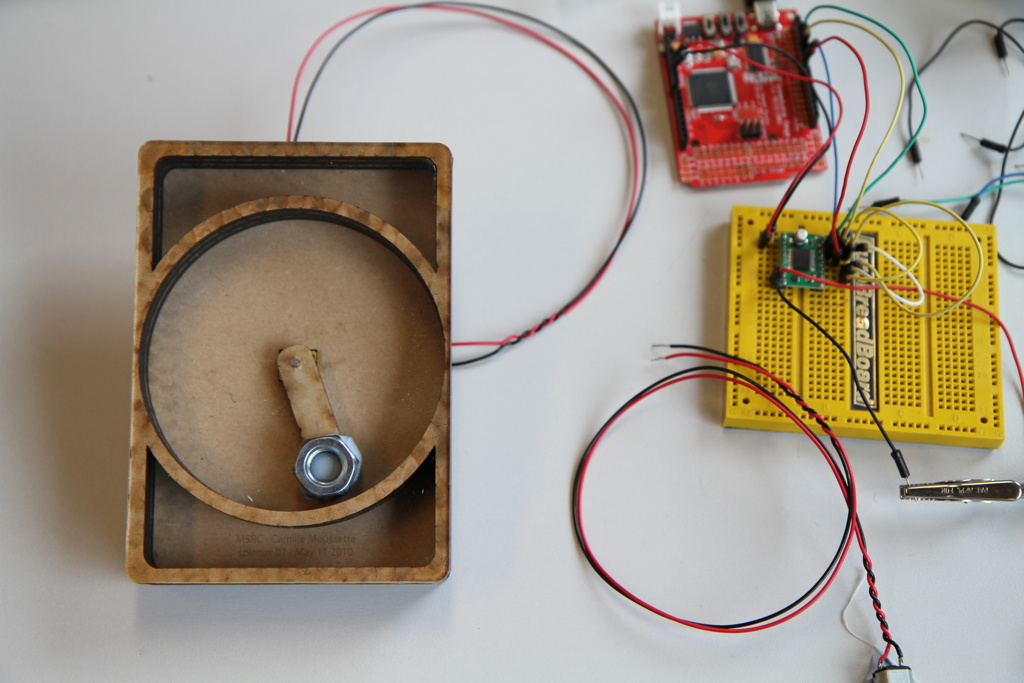
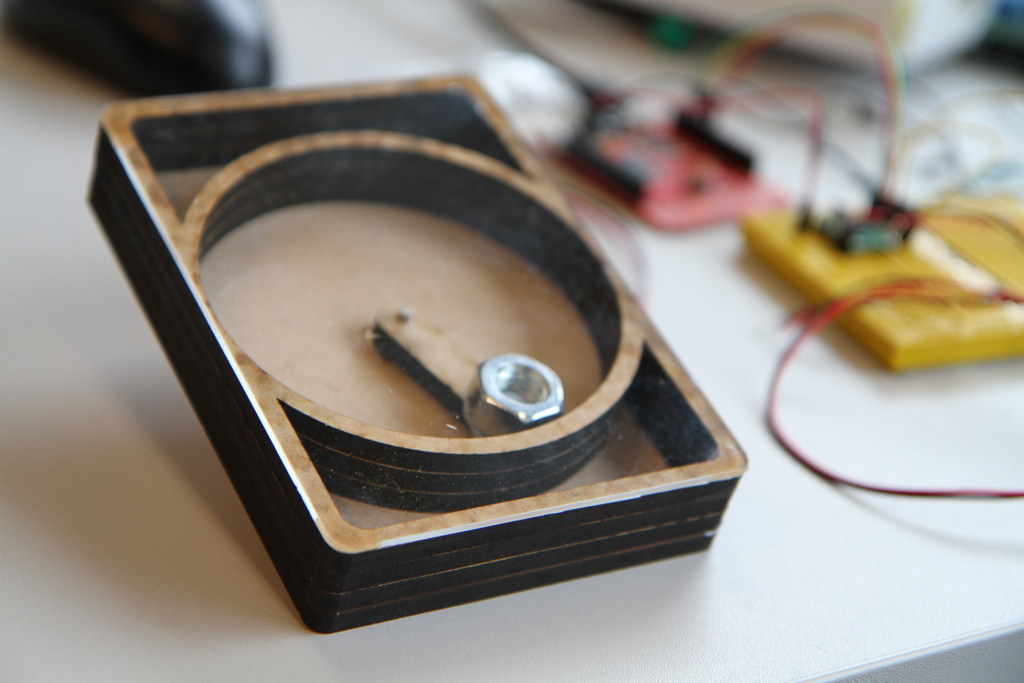
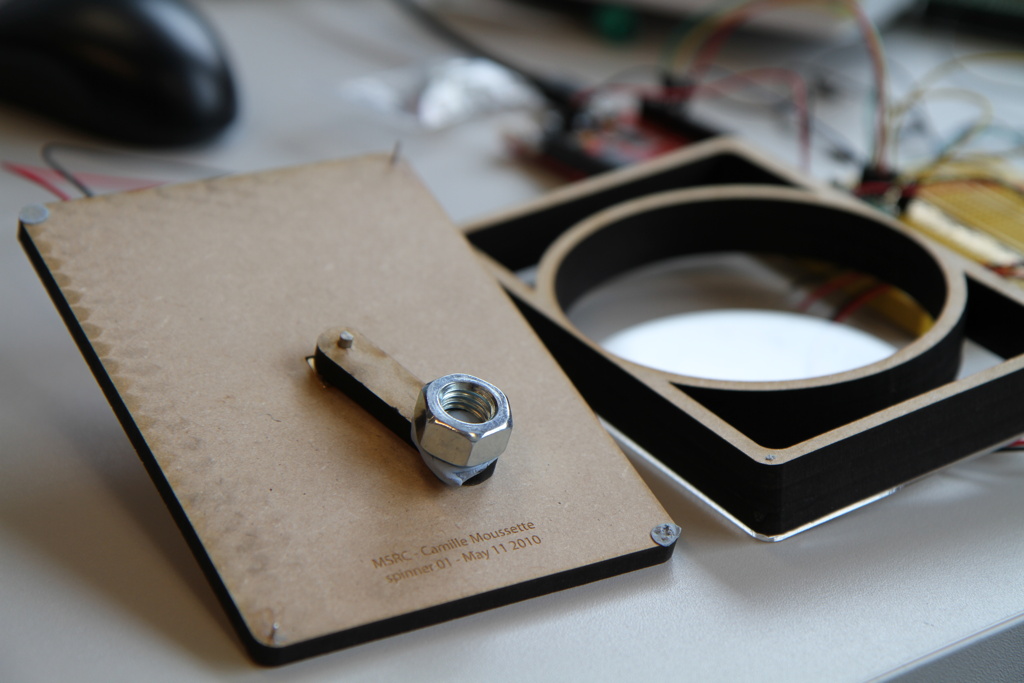
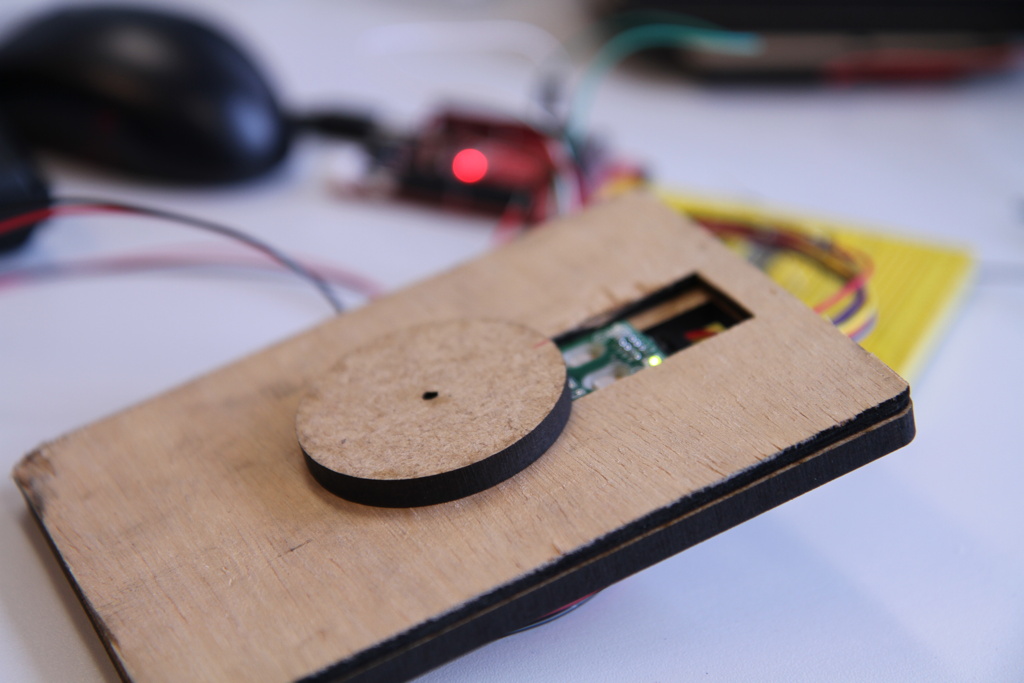
Spinner 01
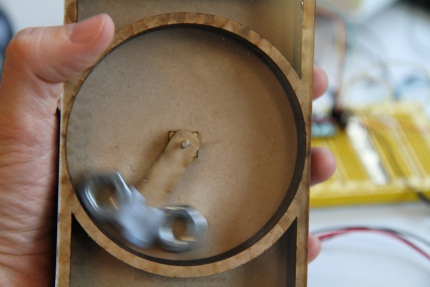
Steel nuts are attached to an rotating arm. The rotation speed is controlled by a small DC motor. No position control, only speed and direction.
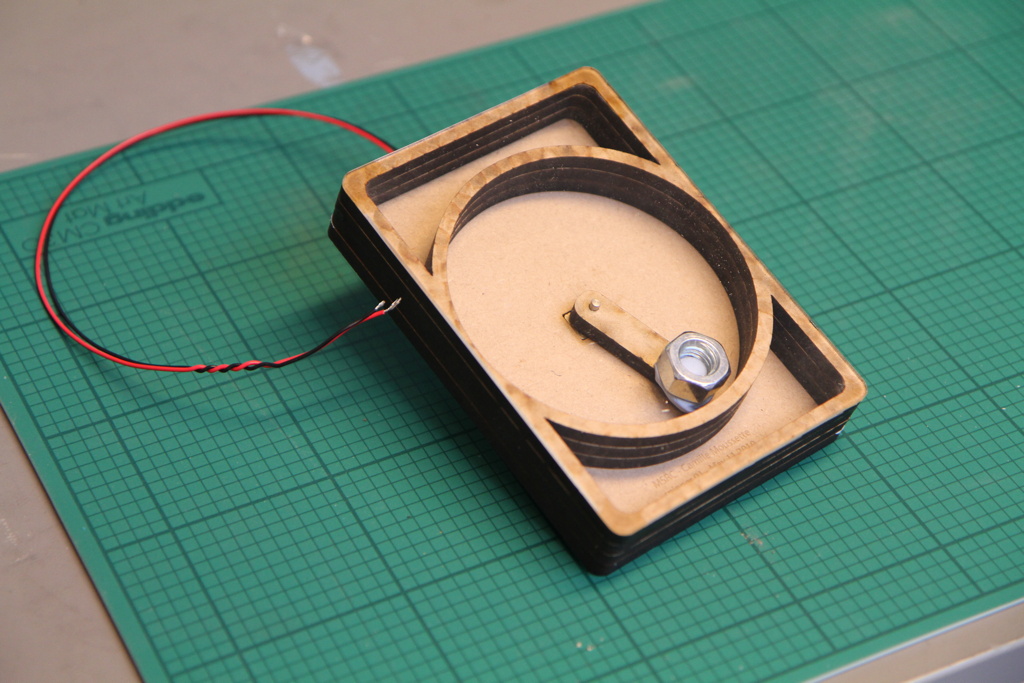
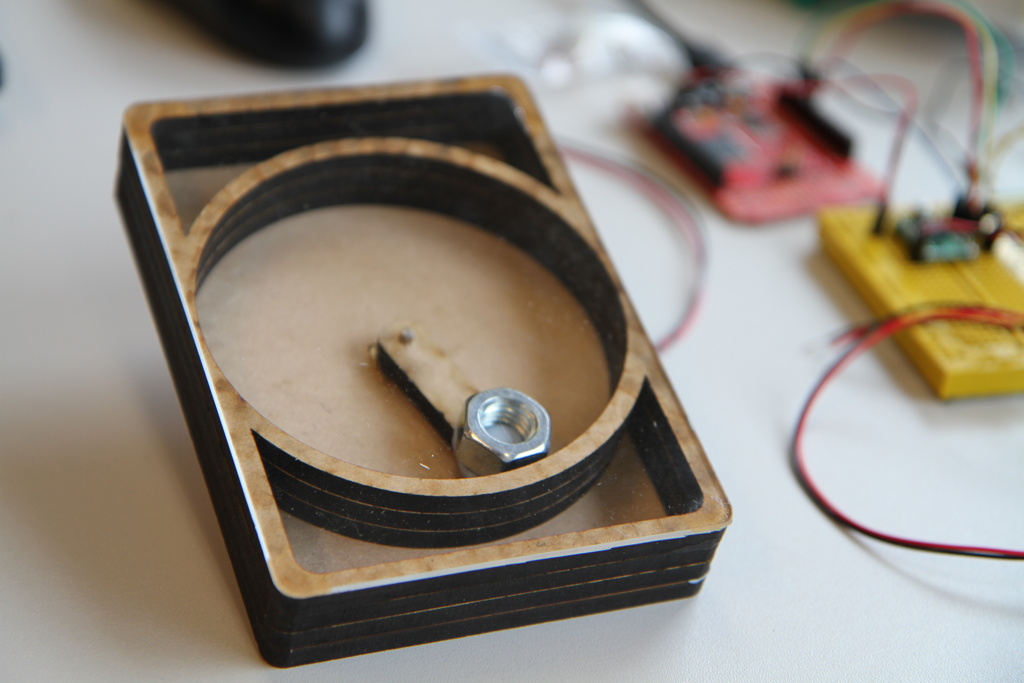
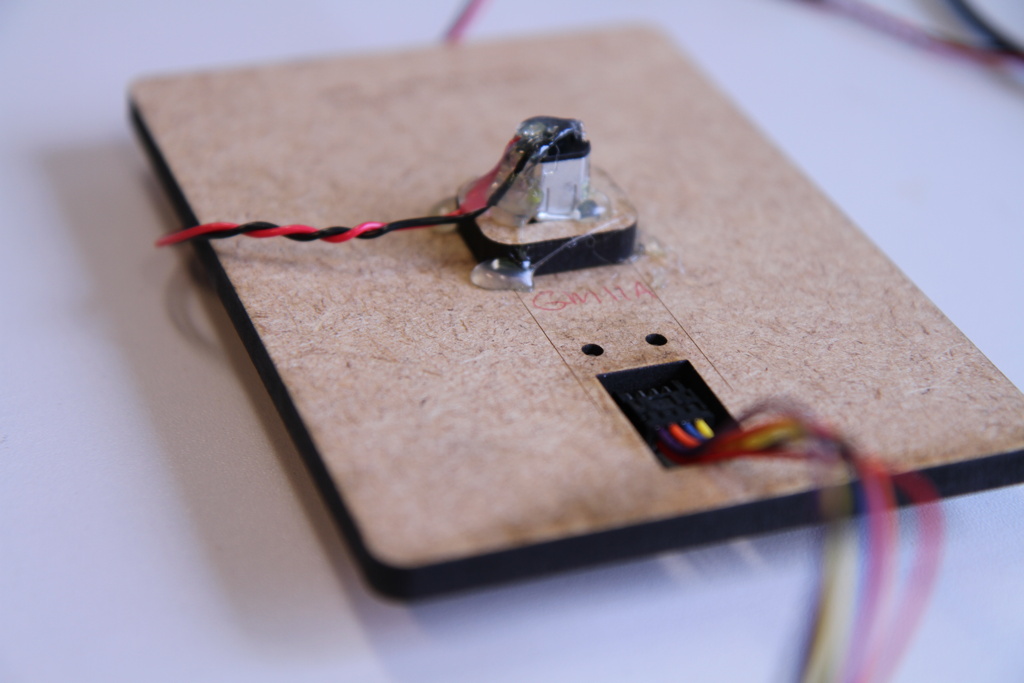
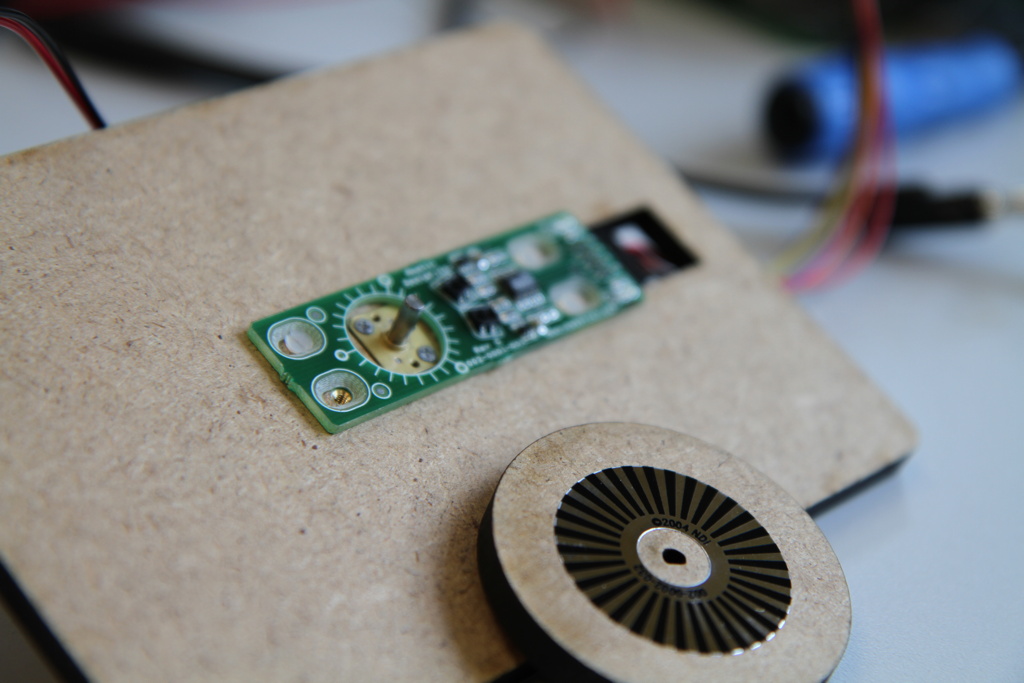
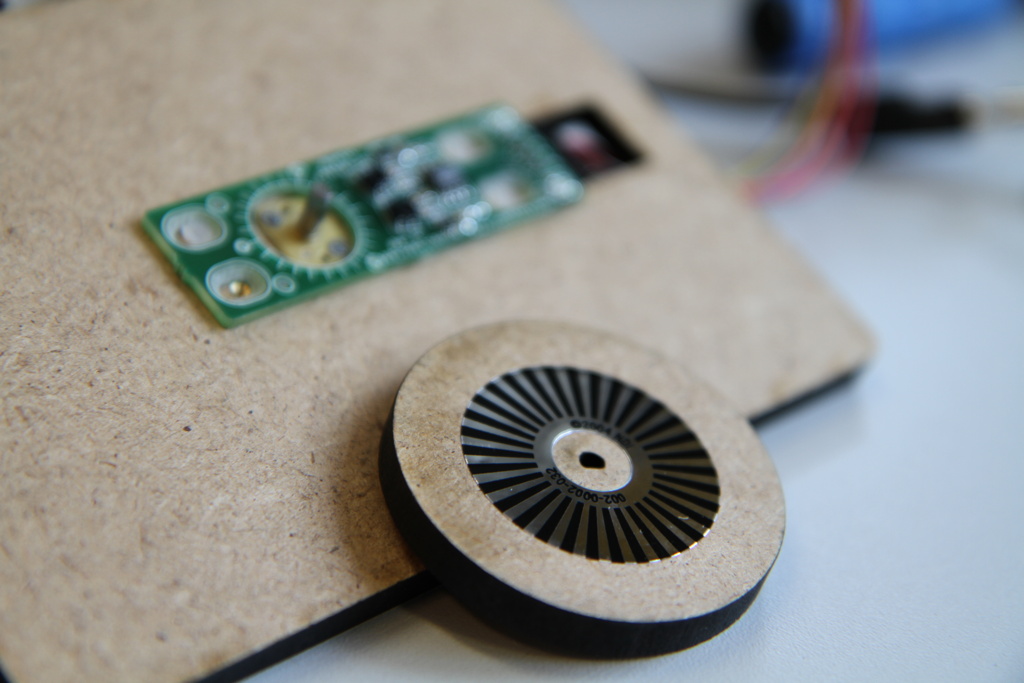
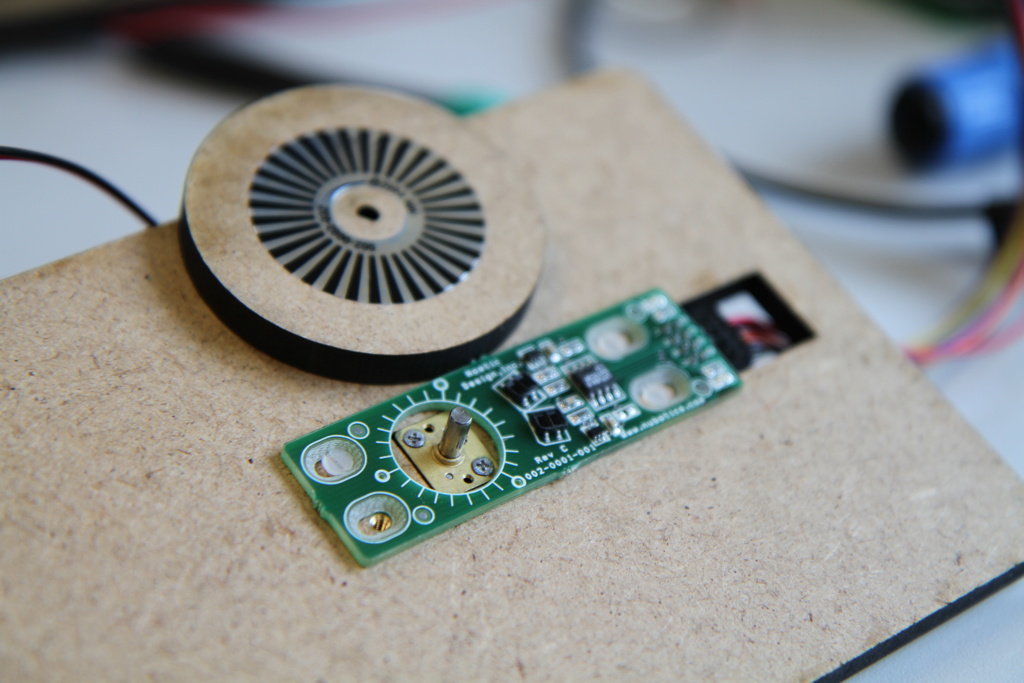
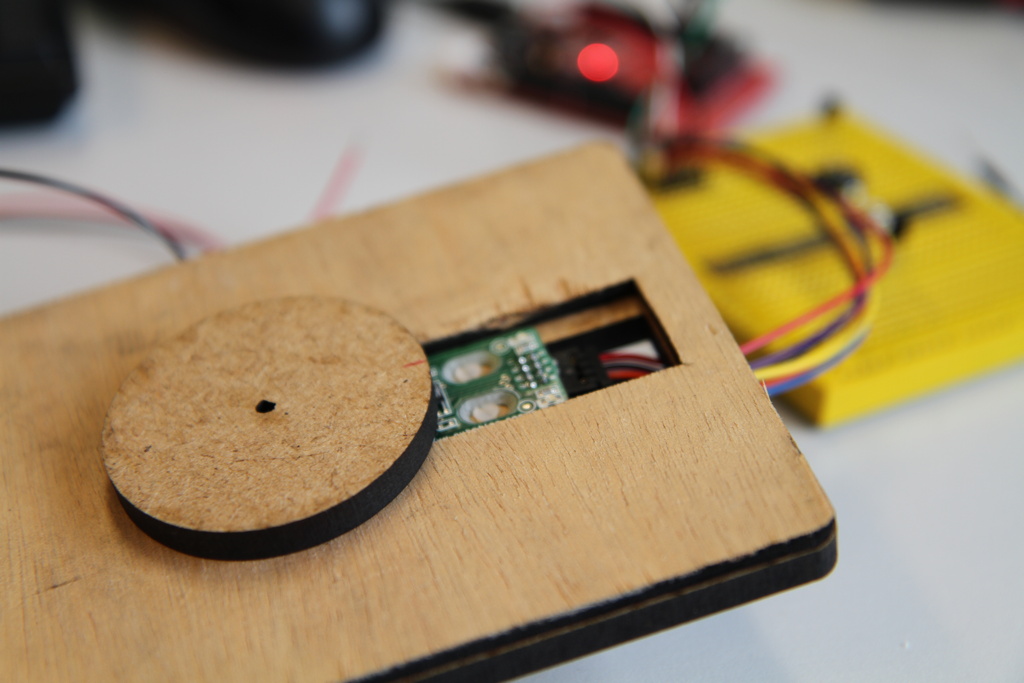
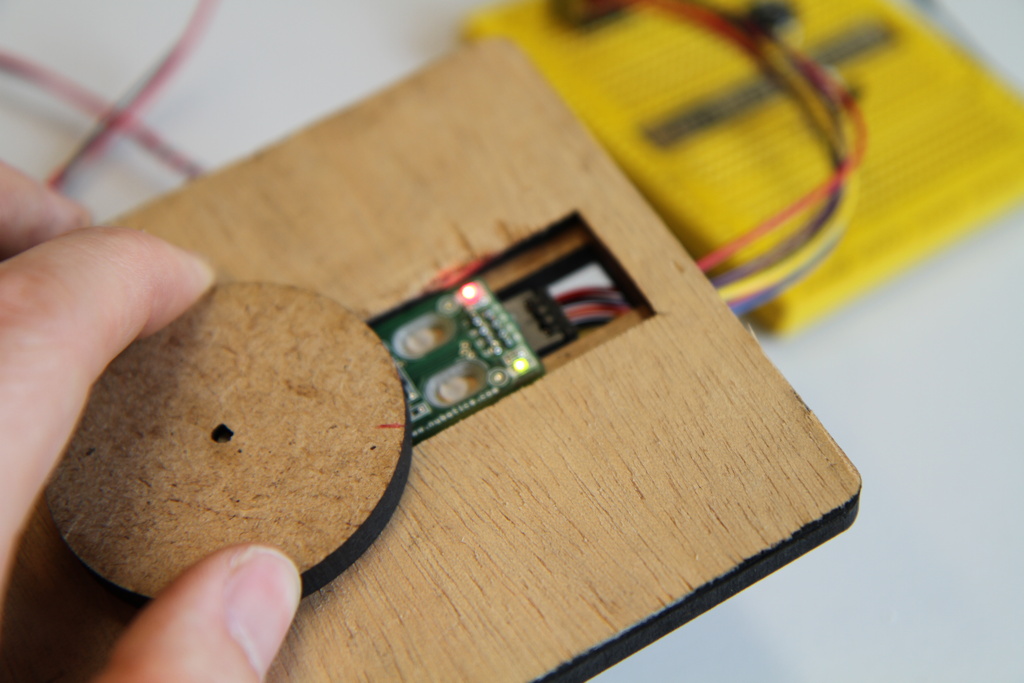
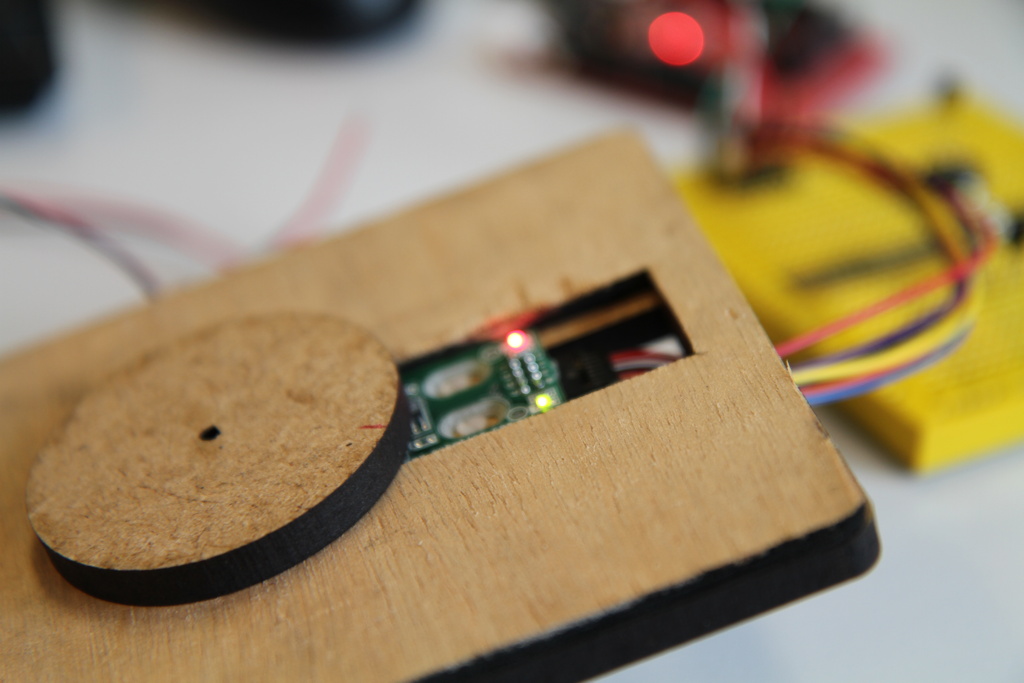
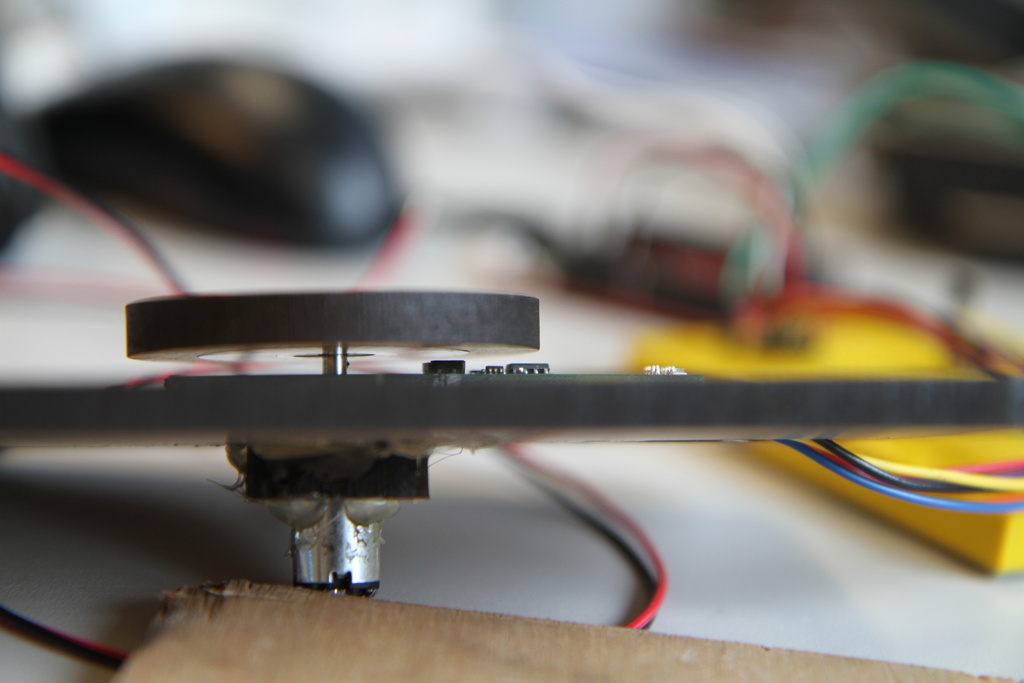
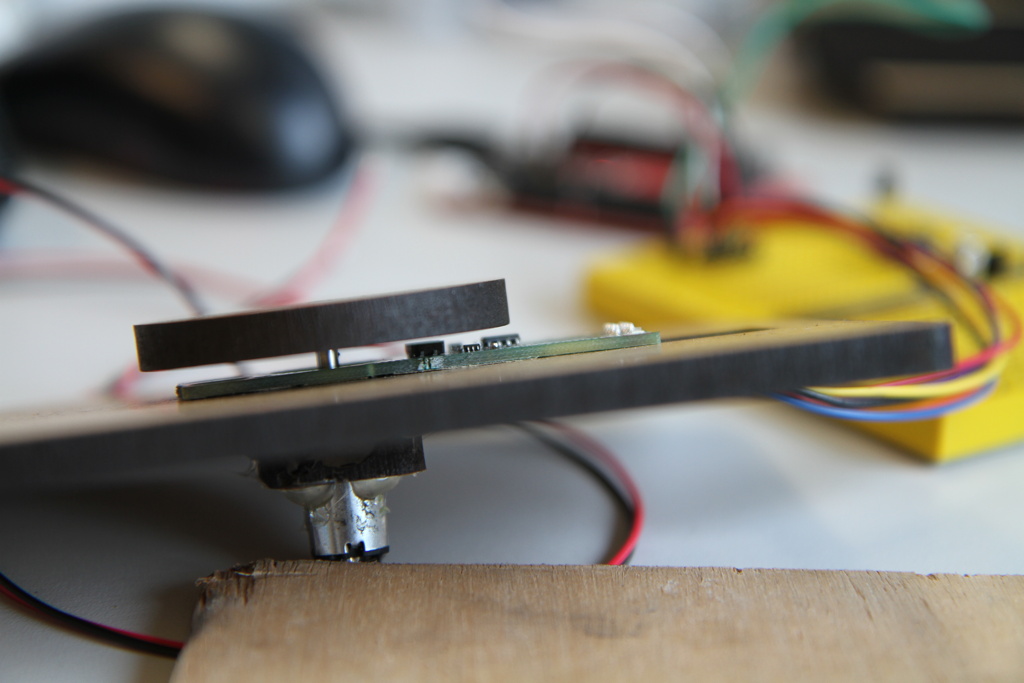
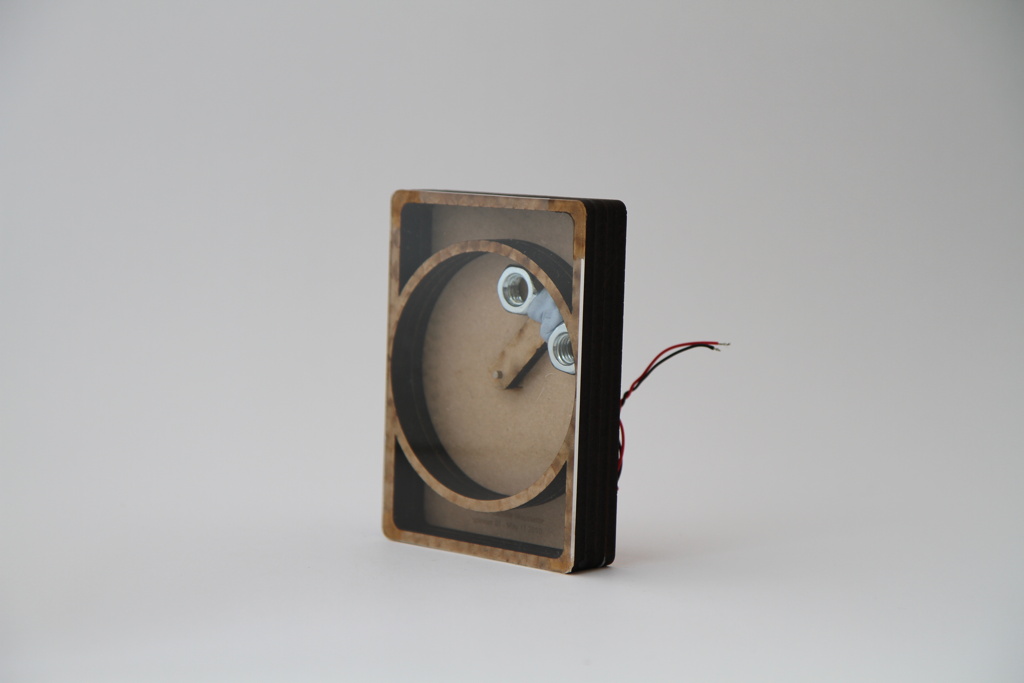
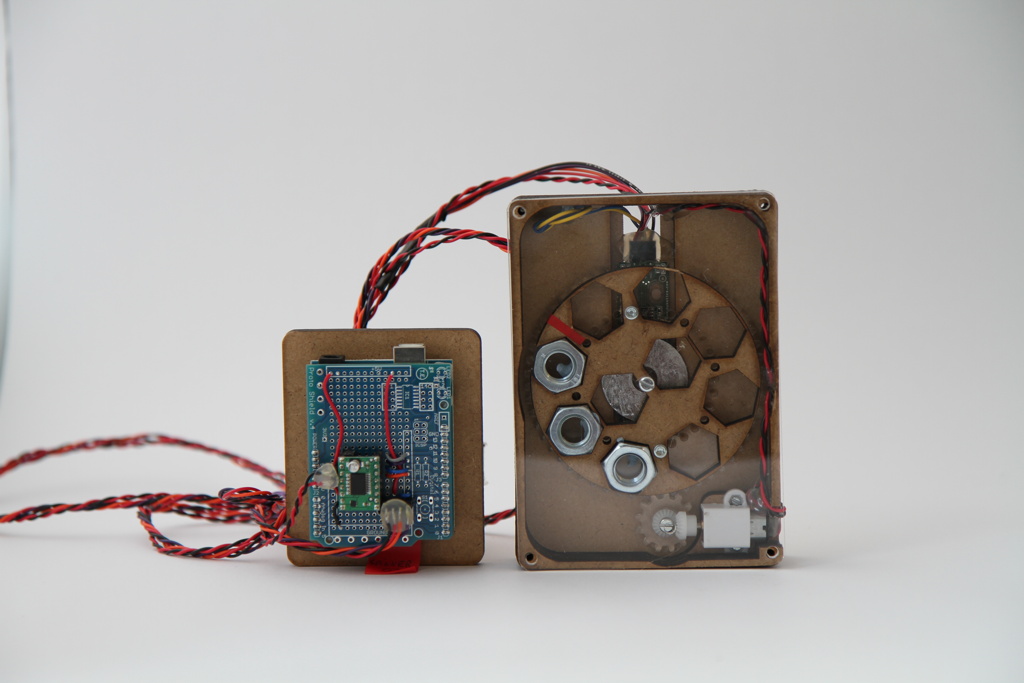
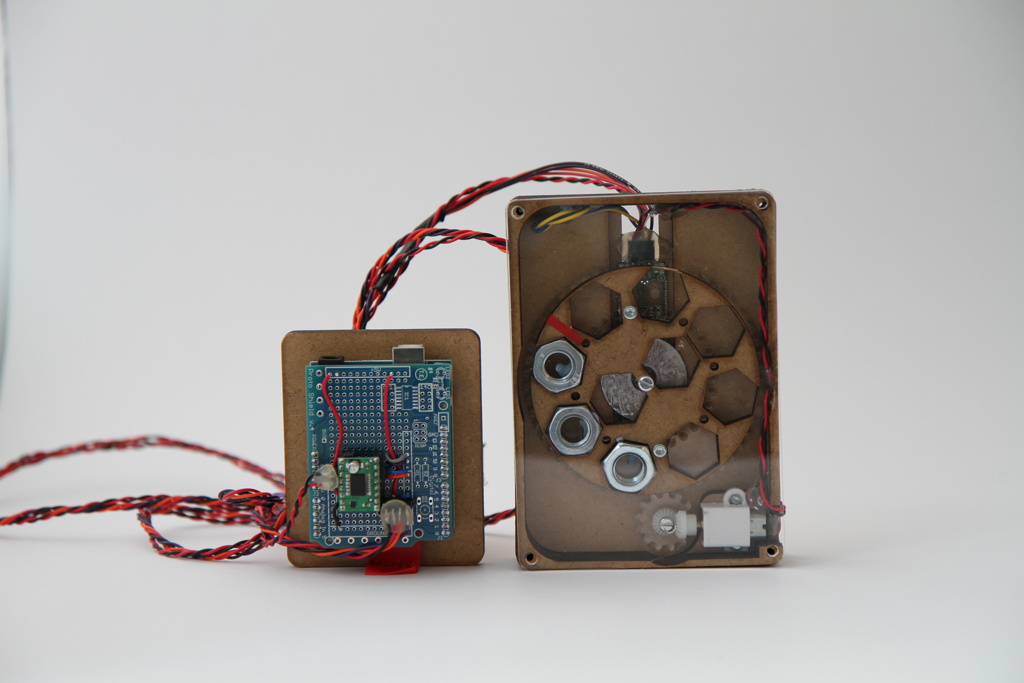
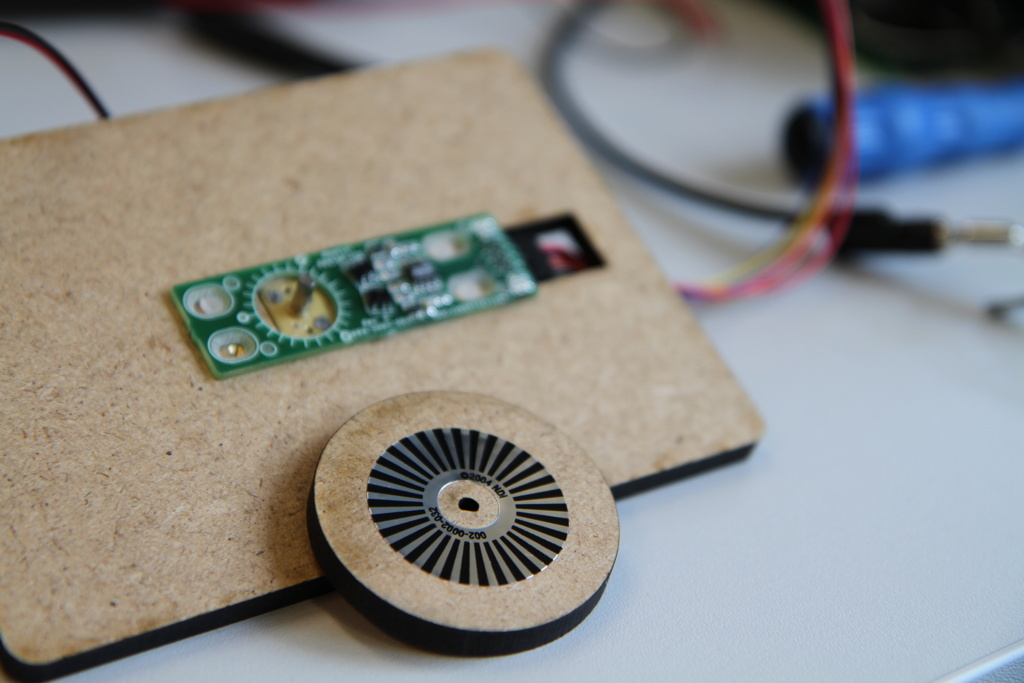
Spinner 02
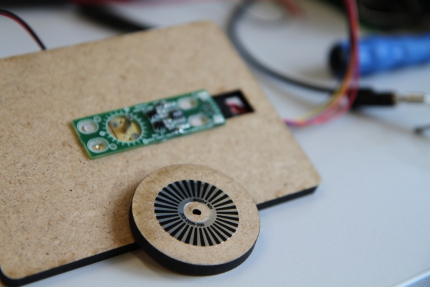
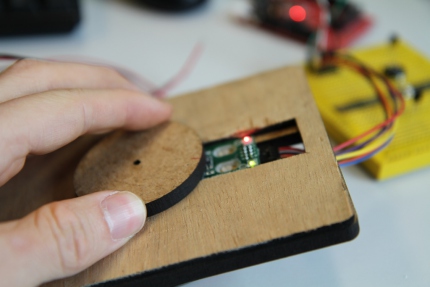
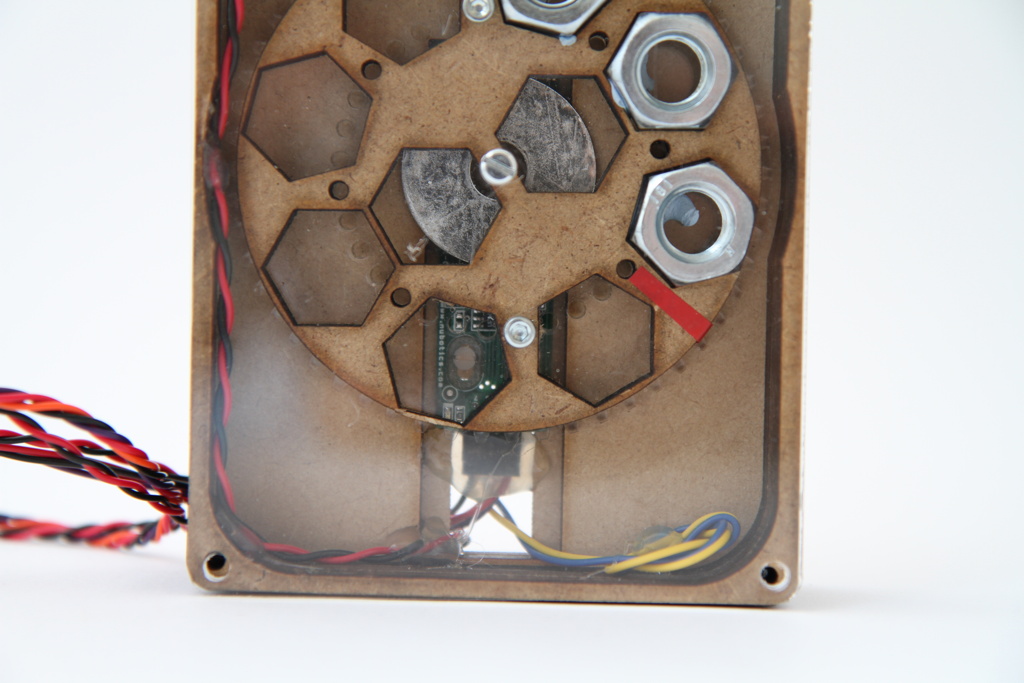
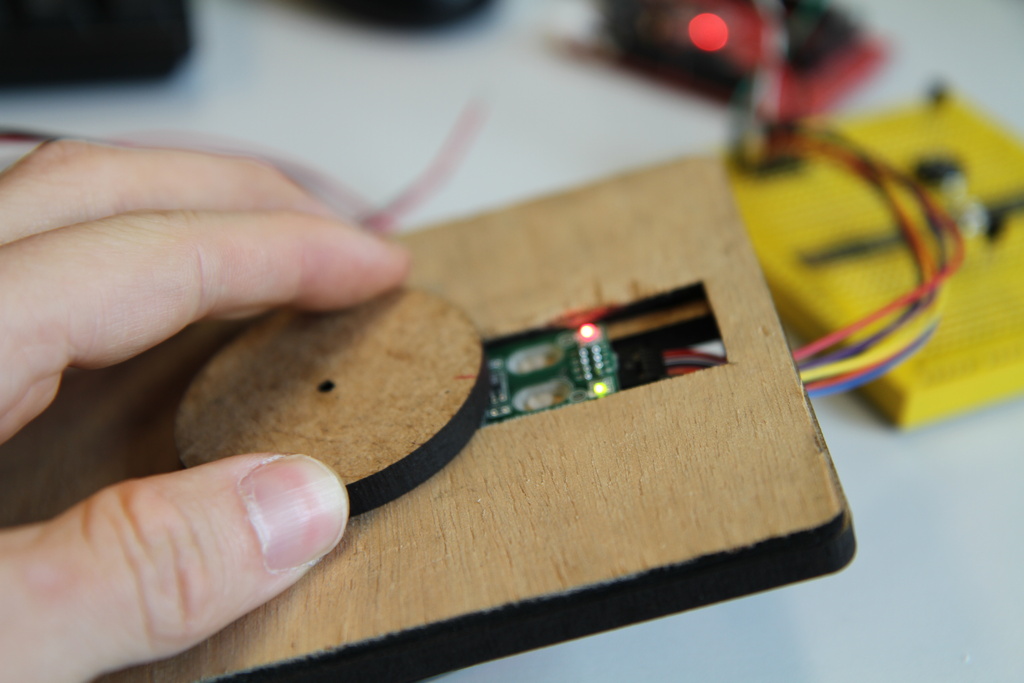
In this iteration, I am testing a wheel-encoder to add position control to the setup. This way I can precisely rotate the ballast is a specific direction, i.e. like a weighted-compass.
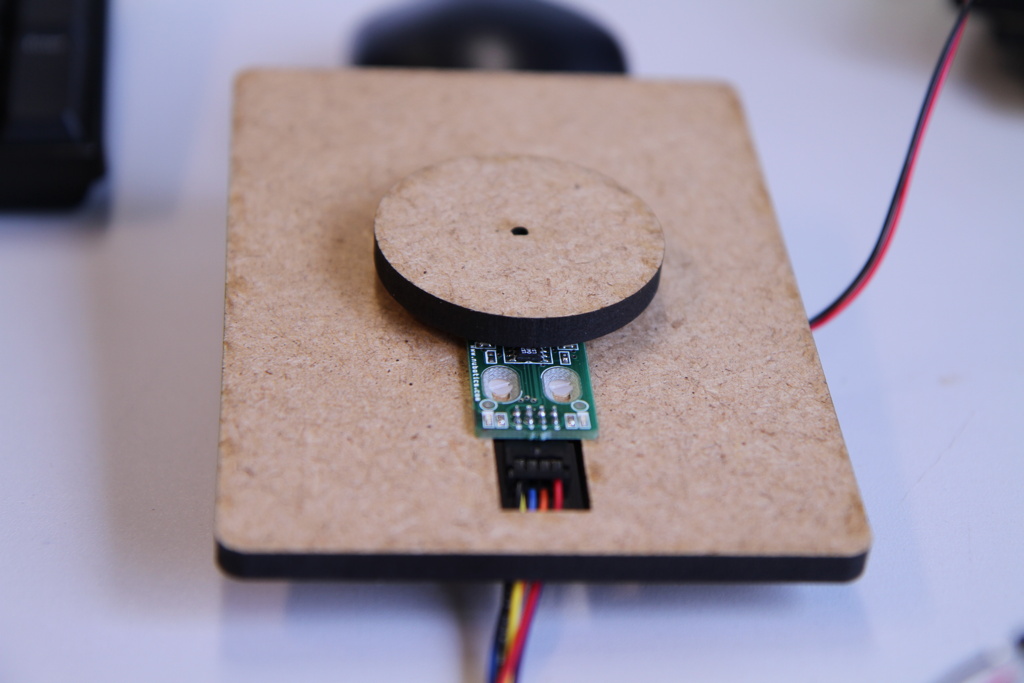
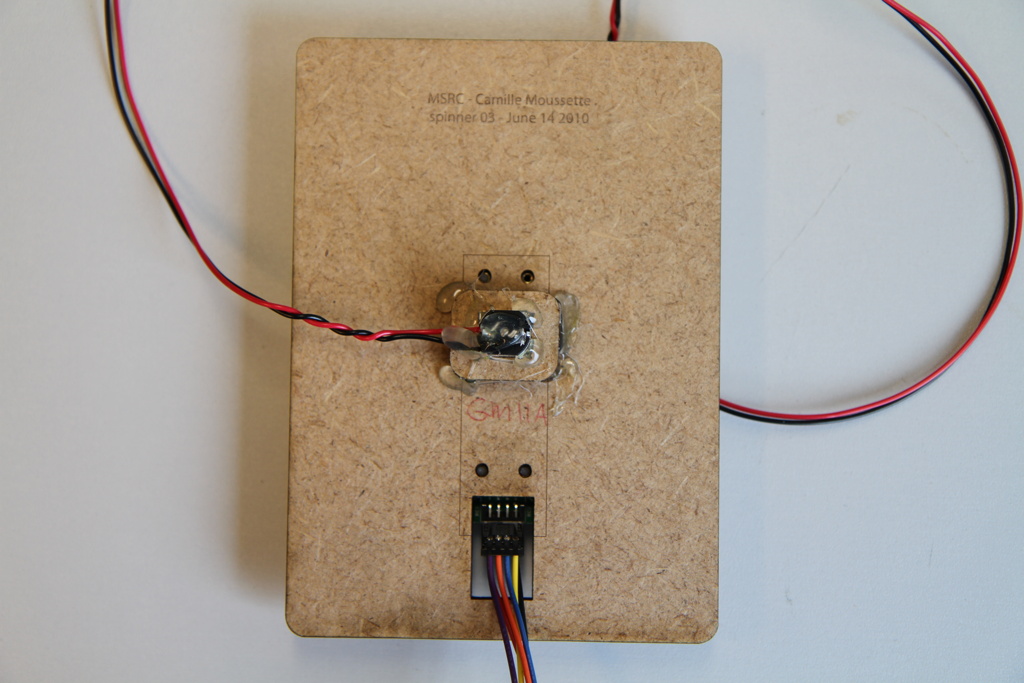
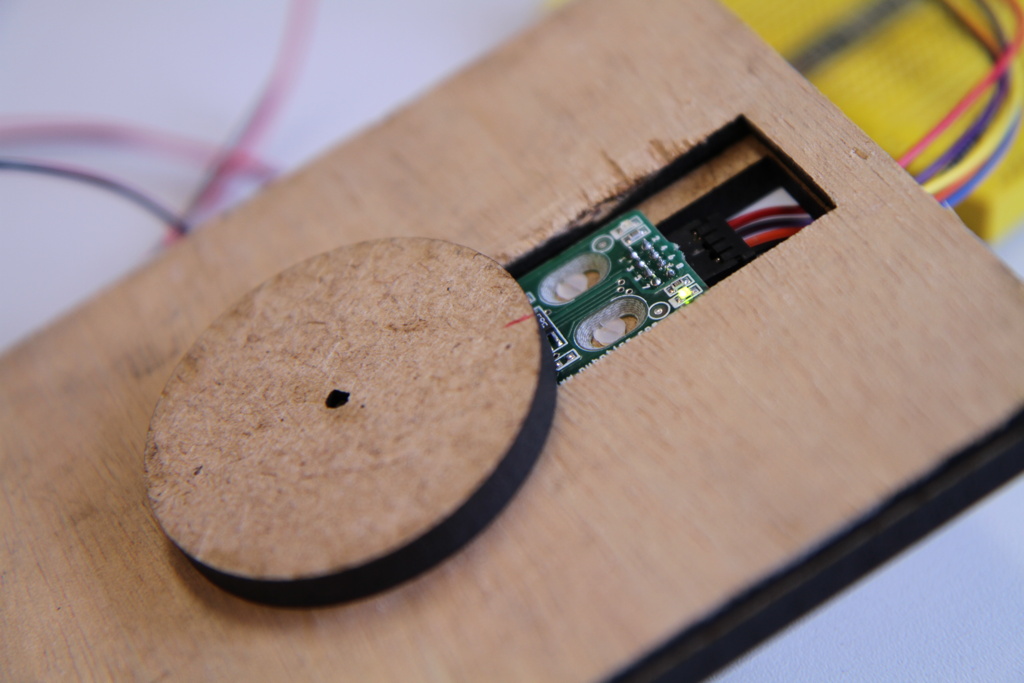
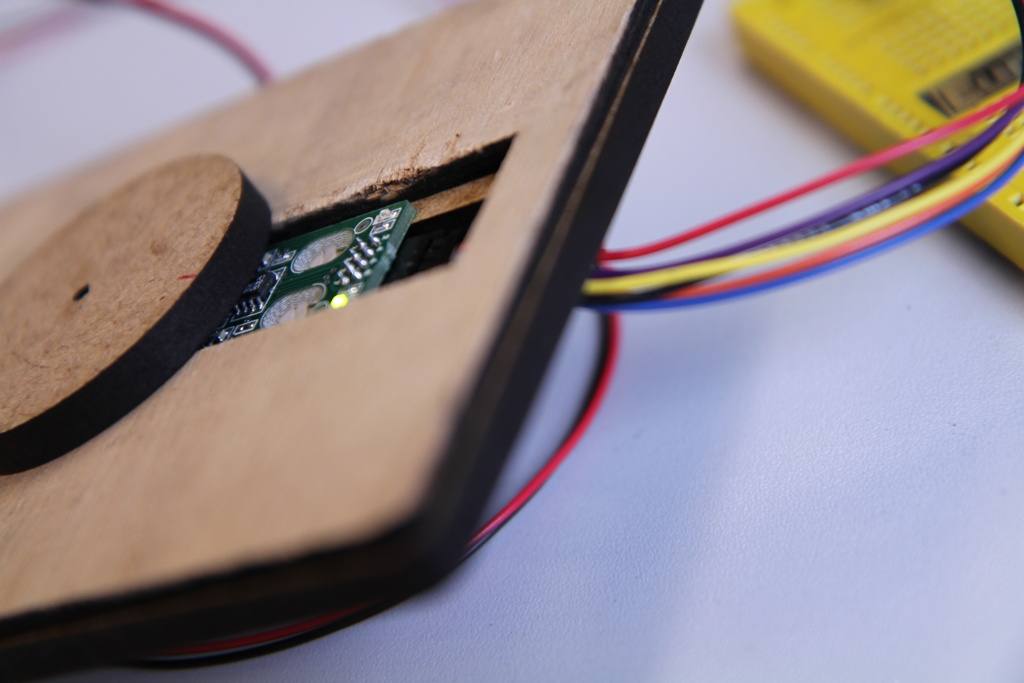
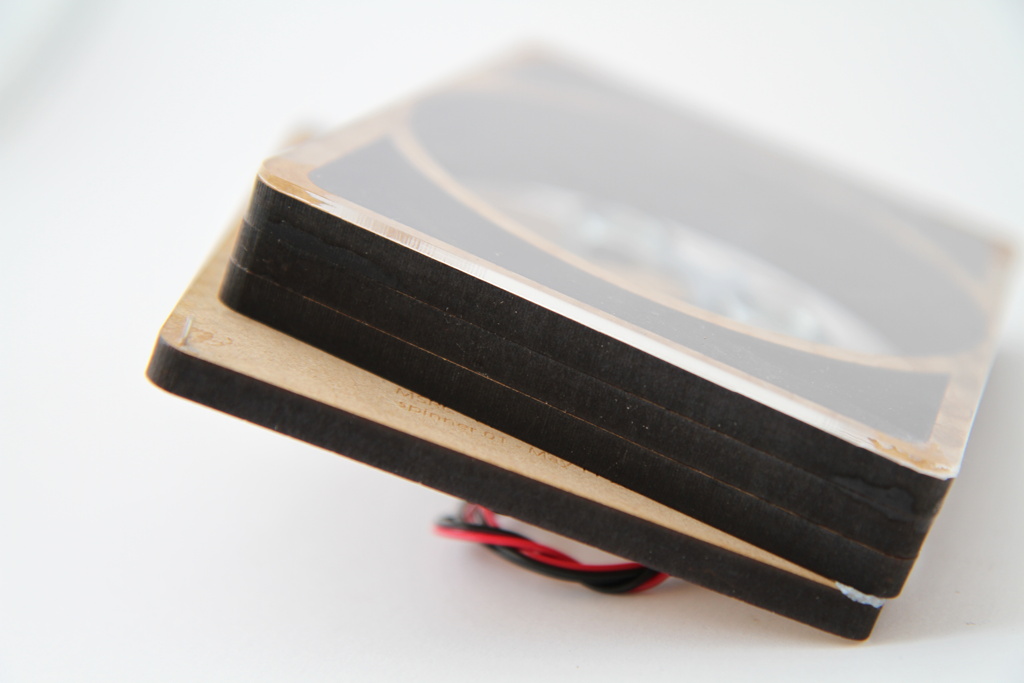
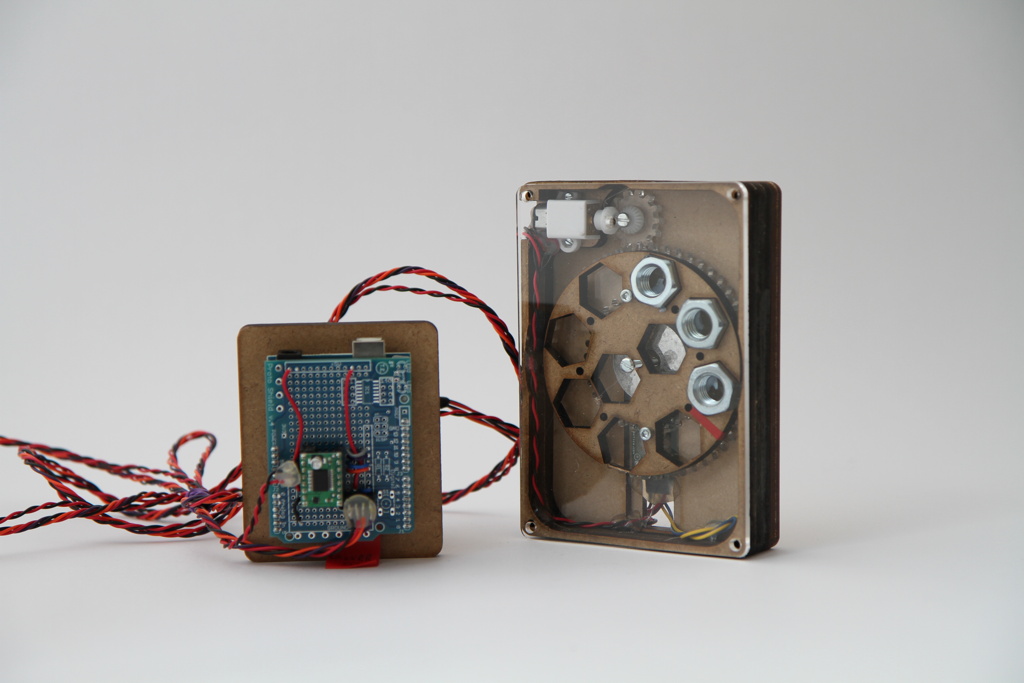
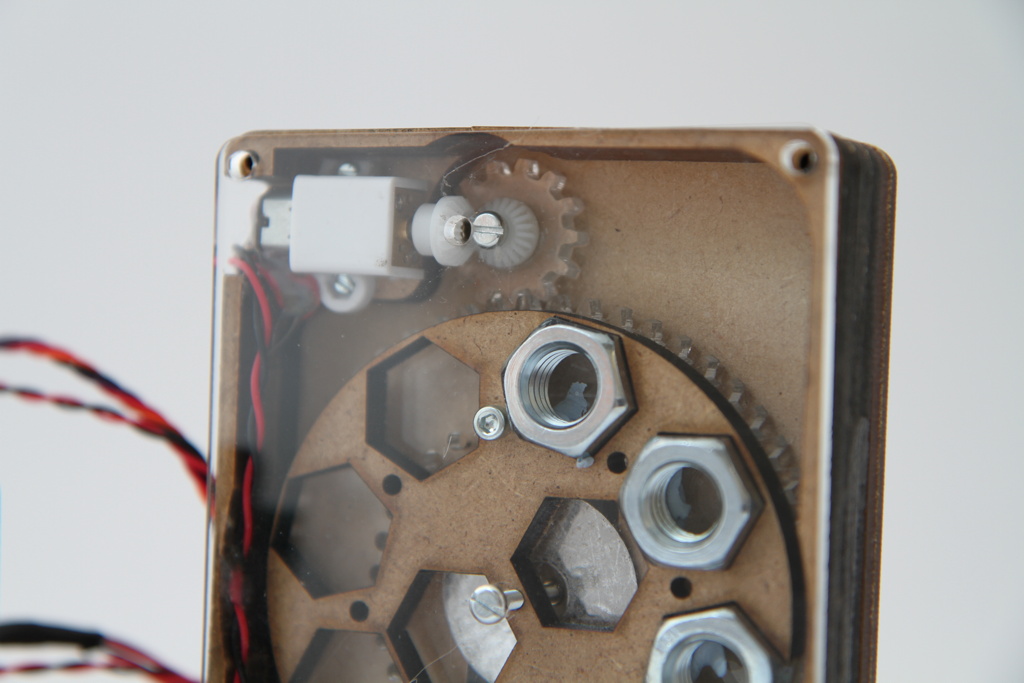
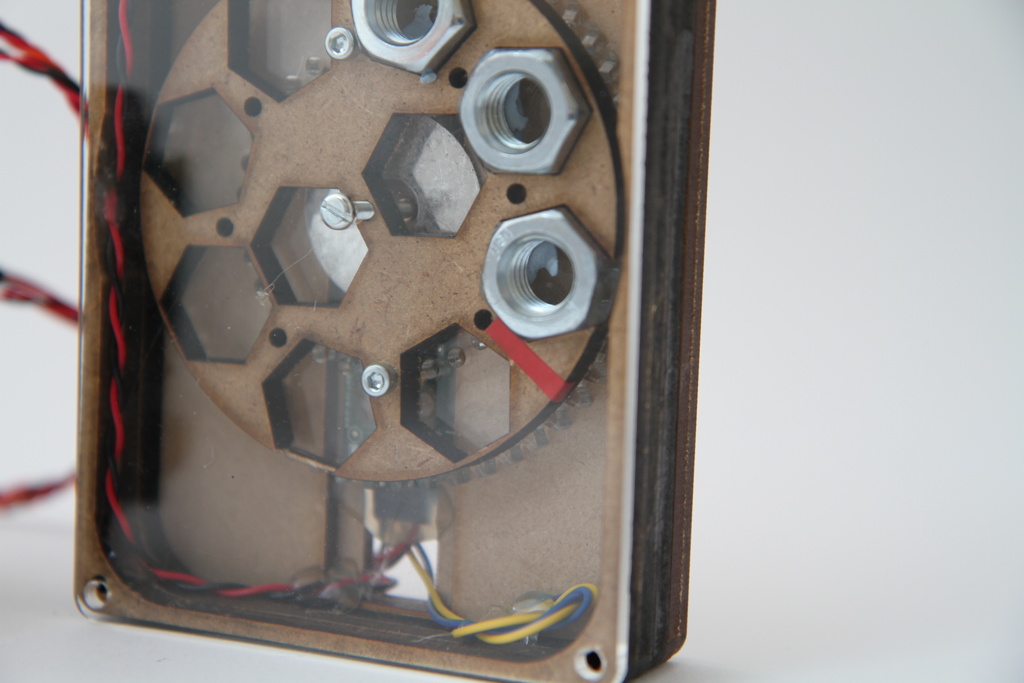
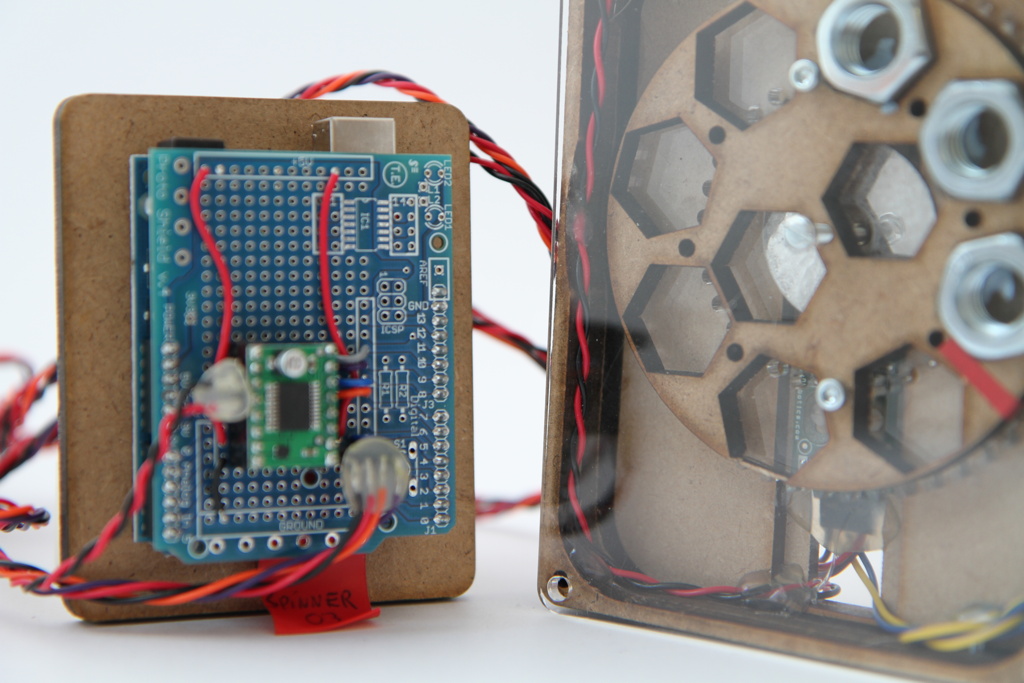
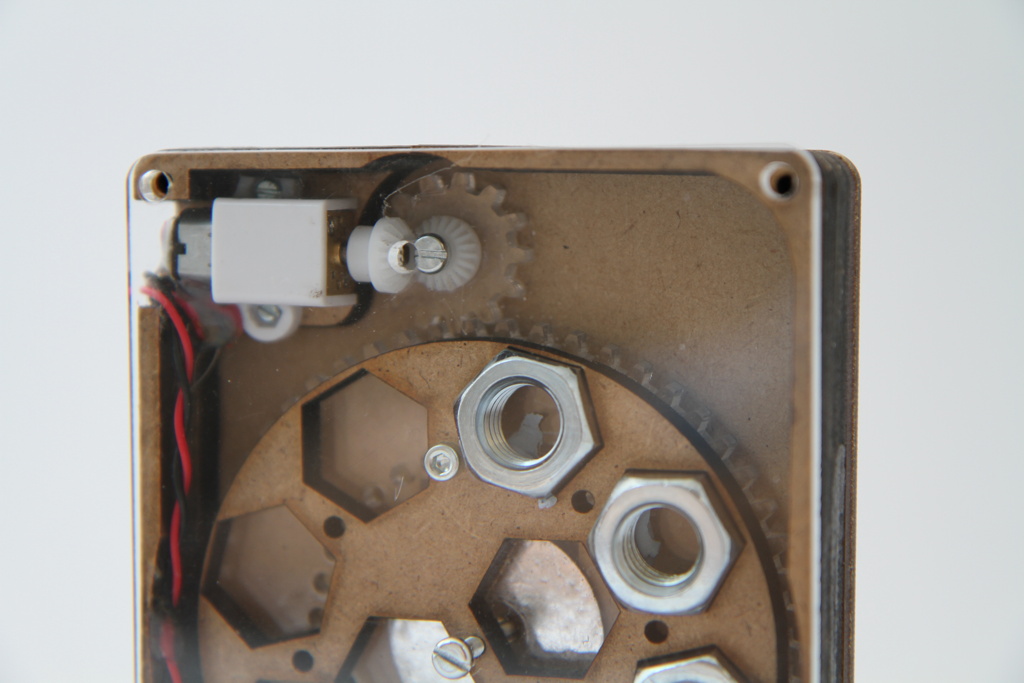
Spinner 03 (final)
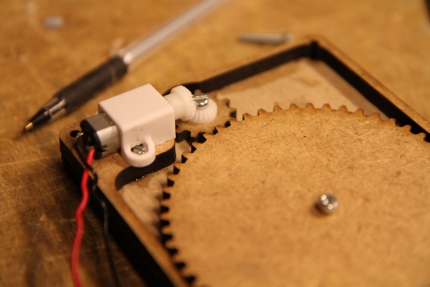
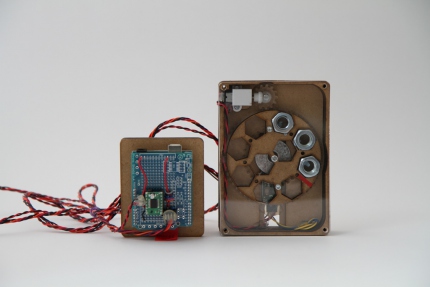
The motor has been moved to a flat configuration to obtain a slimmer device. Gears have been added to move the rotating plate. The ballast can be modified by reconfiguring the dead-weights.
Videos
Have a weight moving around in circular motion inside the device. What are the qualities and particularities of having a center-of-mass moving in circular motion, versus in linear motion.
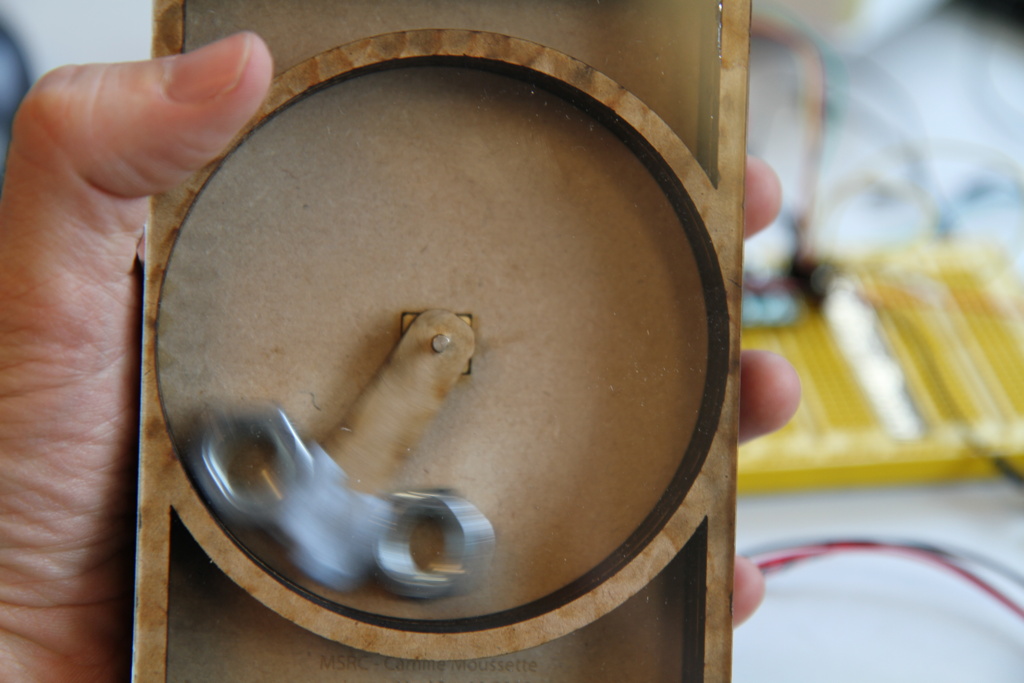
Steel nuts are attached to an rotating arm. The rotation speed is controlled by a small DC motor. No position control, only speed and direction.
Spinner 02
In this iteration, I am testing a wheel-encoder to add position control to the setup. This way I can precisely rotate the ballast is a specific direction, i.e. like a weighted-compass.
Spinner 03 (final)
The motor has been moved to a flat configuration to obtain a slimmer device. Gears have been added to move the rotating plate. The ballast can be modified by reconfiguring the dead-weights.
Videos
In this iteration, I am testing a wheel-encoder to add position control to the setup. This way I can precisely rotate the ballast is a specific direction, i.e. like a weighted-compass.


The motor has been moved to a flat configuration to obtain a slimmer device. Gears have been added to move the rotating plate. The ballast can be modified by reconfiguring the dead-weights.
Videos
Related photos